Protocol Interface Module - PIM (PLC Interface)
Featured Product from Ametek Solartron Metrology
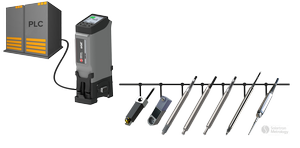
Solartron Metrology introduces the Ethernet/IP™, ProfiNet®, EtherCat™ & Modbus TCP Interface Modules. These modules allow easy connections between the interface module enabled controller and Solartron’s flexible Orbit® 3 Digital Measurement System.
Solartron Metrology’s Protocol Interface Module (PIM) provides a simple way of interfacing the Orbit® Digital Measuring Network to most Programmable Logic Controllers (PLCs). A distinct PIM is created for each protocol, including:
- Ethernet/IP™
- ProfiNet™
- EtherCat™
- Modbus TCP
- Modbus RTU (RS 485 Serial) can be interfaced using Solartron’s standard MODIM Interface. (PSIM required)
Click here to see the PIM Datasheet that includes Sample Applications.
The PIM Includes the following features:
- Communicate with up to 150 Orbit modules with Explicit Messaging or 50 with Cyclic Messaging
- Power up to 10 Orbit modules (depending on type). (A PSIM can be used when more than 10 is required)
- Connect any Solartron Digital sensor including lasers
- Connect 3rd party sensors via the Analog Interface Module (AIM)
- Set up via free software interface
Ethernet/IP™
- One of the primary connectivity tools to different Rockwell Automation platforms, or any other PC’s that support Ethernet/IP™
- Explicit Messaging aspect of the protocol has been implemented for reading and setting individual parameters
- Cyclic messaging has been implemented to facilitate synchronized readings
- Ethernet I/P Server Mode: In server mode, the module accepts commands from one or more clients to read/write data stored in the modules internal registers
ProfiNet™
- One of the primary connectivity tools to different Siemens platforms or any other devices that support ProfiNet™
- The Explicit Messaging aspect of the protocol has been implemented for reading and setting individual parameters, cyclic messaging has been implemented to facilitate synchronized readings
EtherCat™
- EtherCat™ is the open real-time Ethernet network originally developed by Beckhoff
- The EtherCat™ variant of the PIM provides both Explicit and Implicit data sets. However, they are all communicated through the same EtherCat™ backbone, there is a data latent reading the explicit non cyclic data.
Modbus TCP
- The ModbusTCP PIM variant provides communications between an Orbit® network of instruments and an ModbusTCP Master.
- The address ranges define the cyclic and implicit data sections with Input registers and output from 0 to being the cyclic data and holding registers from 4112
- The ModbusRTU Interface Module (MODIM) provides a simple interface for MODBUS RTU operating over RS485.
- Data transfer from Orbit is either individual readings of modules or synchronized readings of multiple modules
- Up to 115,000 Baud Rate
Set up as standard Orbit module that must be powered by PSIM.