We can t hope to cover all the important details of one- and two-dimensional signal processing in one chapter. For those who have already seen this material, we hope this chapter will serve as a refresher. For those readers who haven t had prior exposure to signal and image processing, we hope that this chapter will provide enough of an introduction so that the rest of the book will make sense.
All readers are referred to a number of excellent textbooks that cover one-and two-dimensional signal processing in more detail. For information on 1-D processing the reader is referred to [McG74], [Sch75], [Opp75], [Rab75]. The theory and practice of image processing have been described in [Ros82], [Gon77], [Pra78]. The more general case of multidimensional signal processing has been described in [Dud84].
2.1 One-Dimensional Signal Processing
2.1.1 Continuous and Discrete One-Dimensional Functions
One-dimensional continuous functions, such as in Fig. 2.1(a), will be represented in this book by the notation
where x(t) denotes the value as a function at t. This function may be given a discrete representation by sampling its value over a set of points as illustrated in Fig. 2.1(b). Thus the discrete representation can be expressed as the list
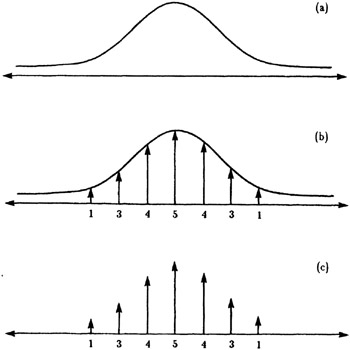 Fig. 2.1: A one-dimensional signal is shown in (a) with its sampled version in (b). The discrete version of the signal is illustrated in (c).
Fig. 2.1: A one-dimensional signal is shown in (a) with its sampled version in (b). The discrete version of the signal is illustrated in (c). As an example of this, the discrete representation of the data in Fig. 2. 1(c) is
It is also possible to represent the samples as...
Copyright The Society for Industrial and Applied Mathematics 2001 under license agreement with Books24x7