Nature Inspired Robotics
Featured Product from FAULHABER MICROMO

Innovative solutions from the natural world are increasingly used as the template for the development of new, efficient and sustainable products and technologies. One example of this kind of nature-inspired technology is the “LAURON” six-legged walking machine produced by the FZI Computer Research Centre in Karlsruhe, winner of this year's FAULHABER University Project Award. MICROMO, a member of the FAULHABER Group, represents FAULHABER technologies in North America and is located in Clearwater, Florida. FAULHABER (also referred to as DFF – “Dr. Fritz Faulhaber Gmbh and Co. KG”) is located in Schoenaich, Germany.
It started with stick insects...
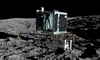
LAURON was designed for use in settings that are too hazardous for people, are difficult for access by wheeled or chain-powered systems, or where the emphasis is on being as gentle as possible on the environment. Applications include search and rescue missions in partially collapsed buildings, exploration of volcanoes, the clearing of minefields and the search for waste in ecologically sensitive areas. As walking is a natural process, it is obvious that the designs and control systems of many walking machines are based on natural examples. In the case of LAURON, inspiration came from the Indian stick insect. Like its natural prototype, LAURON has six legs on a long central body that houses the required control electronics. Each of the six 50 cm legs has a spring-cushioned foot and can be moved by means of joints. The angle of view of the body can also be altered through the use of two independent axles (swivel and tip), meaning LAURON has a total of more than 20 degrees of freedom.
Robust yet sensitive drive solution…
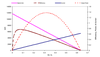
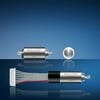
The walking robot is fitted with numerous sensor systems. Each foot has 3D power sensors and elasticity measurement systems that are used in conjunction with a motor current measuring system to detect collisions and contact with the surface. High performance and low weight were two essential prerequisites for the drive solution to be used for the three-jointed legs. With this in mind, the project team for the Interactive Planning Technology Group at the FZI Computing Research Centre in Karlsruhe opted for a combination of motor and gears based on the FAULHABER DC-Micromotor series 2657 with series 26/1 Planetary Gearheads. To reduce the moving mass, the drives were kept as close as possible to the body. Power from the 20 graphite-commuted DC drives is transferred from here to the joints by means of gears and control wires. The maximum torque that can be achieved is around 20 Nm (or 40 Nm for a short time). The joint angles of the legs are recorded by means of high-precision optical encoders. At the same time, each motor has a high-resolution encoder that provides additional information on the joint angles. Apart from the weight, the reliability of the robust drives was another key reason for choosing the FAULHABER drive system. Please contact MICROMO regarding more information on FAULHABER technologies.