2.2 Brief Overview on CNN Architectures
CNNs were introduced by L.O.Chua [Chua and Yang (1988a); Chua and Yang (1988b)] in 1988. His idea was to use an array of simple, identical, locally interconnected nonlinear dynamic circuits, called cells, to build large scale analog signal processing systems. The cell was defined as the nonlinear first-order circuit shown in Fig. 2.1(a), u ij , y ij and x ij being the input, the output and the state variable of the cell respectively. The output is related to the state by the nonlinear equation:
| (2.1) | 
|
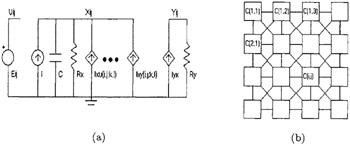 Fig. 2.1: (a) The CNN cell scheme, (b) A CNN bi-dimensional array.
Fig. 2.1: (a) The CNN cell scheme, (b) A CNN bi-dimensional array. A CNN is defined as a two-dimensional array of Mx N identical cells arranged in a rectangular grid, as depicted in Fig. 2.1(b). Each cell mutually interacts with its nearest neighbors by means of the voltage controlled current sources I xy (i,j;k,l)=A(i,j;k,l)y kl and I xu (i,j;k,l)=B(i,j;k,l)u kl. The constant coefficients A(i,j;k,l) and B(i,j;k,l) are known as the feedback and input cloning templates, respectively. If they are equal for each cell, they are called space-invariant. If B(i,j;k,l)=0 the CNN is said autonomous.
A CNN is described by the state equations of all cells:
| (2.2) | 
|
with i=1, .2, , M and j=1, 2, , N where
with k=1, .2, , M and l=1, 2, , N is the r-neighborhood.
This model is known...








