Analysis and Control of Linear Systems

A collection of articles by engineers and mathematicians, this book is about the theory of continuous-state automated systems whose inputs, outputs and internal variables can vary in a continuous manner.
Chapter written by G rard THOMAS.
Partially originating from the adaptive control, RST control appeared in books around 1980 [AST 90, FARG 86, LAN 93]. Curiously, this approach was systematically described for the numerical control, perhaps because of its origins mentioned above and in [KUC 79]. In fact, this polynomial approach is the traditional correction with two degrees of freedom, a combination between feedback and feedforward on the setting. The primary goal of this chapter is to replace this order in a general context and to show all the degrees of freedom available to the designer. Then, a very simple, even intuitive, methodology is proposed in order to use these degrees of freedom to achieve a certain robustness of the structure created.
Figure 11.1 shows the block diagram of the RST control. Block diagram because transfers R, S and T are polynomials and are thus not proper.
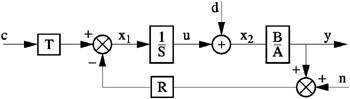
In all that follows, unless otherwise indicated, the systems studied will be discrete or continuous, i.e. will be respectively described by transfers of the z or s variable. For reasons of simplicity and coherence, the examples will be treated in the continuous case.
As for any correction structure, the designer will have to determine the correction parameters (here polynomials R, S and T) to ensure:
internal stability [DOY 92];
the asymptotic follow-up of a certain class of settings;
the...







