Automated Rendezvous and Docking of Spacecraft

This definitive reference for space engineers provides an overview of the major issues governing approach and mating strategies, and system concepts for rendezvous & docking/berthing (RVD/B).
This section intends to provide the details and intermediate calculations required for the derivation of the general equations of the relative motion for circular orbits. The results of this derivation will be shown as a set of differential equations and in a closed form of the state transition matrix for the system.
The general assumption for this derivation is, at this point, that the motion of a body is subject to the effects of a central spherical gravity field and to forces from thruster actuation or disturbances. The spacecraft are considered as point masses for this work.
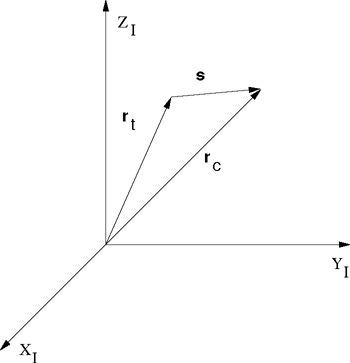
The position vectors in inertial space are defined in figure A.1 for the chaser ( r c) and target ( r t). Their relative position is denoted by s. The equations of motion will be derived conveniently in the target local orbital frame F lo. In the following, scalars will be in normal type and vectors and matrices will be in bold, and it should be clear from the context what is what. Vectors are defined as column vectors.
The general equation for motion under the influence of a central force is Newton's law of gravitation (Newton 1713); see also Eq. (3.1):
where
| F g = | gravitational force |
| G |