Preface
In this book, methods of adaptive signal processing are borrowed from the field of digital signal processing to solve problems in dynamic systems control. Adaptive filters, whose design and behavioral characteristics are well known in the signal processing world, can be used to control plant dynamics and to minimize the effects of plant disturbance. Plant dynamic control and plant disturbance control are treated herein as two separate problems. Optimal least squares methods are developed for these problems, methods that do not interfere with each other. Thus, dynamic control and disturbance canceling can be optimized without one process compromising the other. Better control performance is the result. This is not always the case with existing control techniques. Inverse control of plant dynamics involves feed-forward compensation, driving the plant with a filter whose transfer function is the inverse of that of the plant. Inverse compensation is well known in signal processing and communications. Every MODEM in the world uses adaptive filters for channel equalization. Similar techniques are described here for plant dynamic control. Inverse control is feed-forward control. The same precision of feedback that is obtained with existing control techniques is also obtained with adaptive feed-forward control since feedback is incorporated in the adaptive algorithm for obtaining the parameters of the feed-forward compensator. Inverse control can be used effectively with minimum phase and non-minimum phase plants. It cannot work with unstable plants, however. They must first be stabilized with conventional feedback, of any design that simply achieves stability. Then the plant and stabilizing feedback can be treated as an equivalent stable plant that can be controlled in the usual way with adaptive inverse control. Model reference control can be readily incorporated into adaptive inverse control. Adaptive noise canceling techniques are described that allow optimal reduction of plant disturbance, in the least squares sense. Adaptive noise canceling does not affect inverse control of plant dynamics. Inverse control of plant dynamics does not affect adaptive disturbance canceling. If initial feedback is needed to provide plant stabilization, the design of the stabilizer has no effect on the optimality of the adaptive disturbance canceler. The designs of the adaptive inverse controller and of the adaptive disturbance canceler are quite simple once the control engineer gains a mastery of adaptive signal processing. This book provides an introductory presentation of this subject with enough detail to do system design. The mathematics is simple and indeed the whole concept is simple and easy to implement, especially when compared with the complexity of current control methods. Adaptive inverse control is not only simple, but it affords new control capabilities that can often be superior to those of conventional systems. Many practical examples and applications are shown in the text. Another feature of adaptive inverse control is that the same methods can be applied to adaptive control of nonlinear plants. This is surprising because nonlinear plants do not have transfer functions. But approximate inverses are possible. Experimental results with nonlinear plants have shown great promise. Optimality cannot be proven yet, but excellent results have been obtained. This is a very promising subject for research. The whole area of nonlinear adaptive filtering is a fascinating research field that already shows great results and great promise. This book was originally published under the title Adaptive Inverse Control. We are grateful to IEEE Press and John Wiley, Inc. for bringing it back into print. We are also grateful to colleagues Gene Franklin, Karl Johan Astrom, Jose Cruz, Brian Anderson, Paul Werbos, and Shmuel Merhav for their early comments, suggestions, and feedback. We are grateful to former Stanford students Steve Piche, Michel Bilello, Gregory Plett, and Ming-Chang Liu who confirmed the results with experiments and who assisted with preparation of the drawings and final manuscript. Bernard Widrow Eugene Walach |
Chapter 10.1 - Representation and Analysis of MIMO Systems
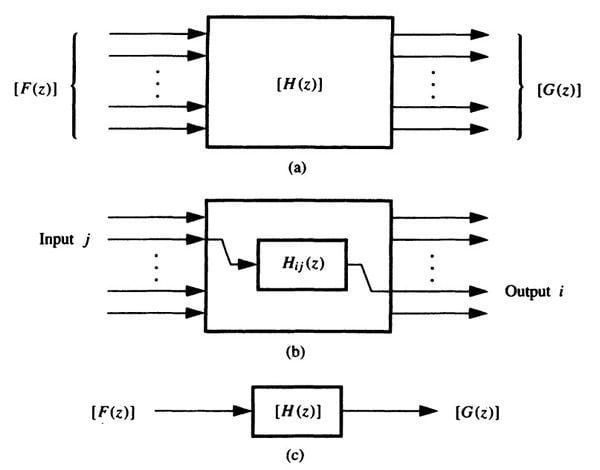
10.1 REPRESENTATION AND ANALYSIS OF MIMO SYSTEMS Figure 10.1 shows a linear dynamic MIMO filter. Its array of K-inputs, after z-transforming, can be represented by the column vector [F(z)]. Its array of outputs, having the same number of elements as the input array, is represented by the column vector [G(z)]. The transfer function of the MIMO filter is represented by a square K x K matrix of transfer functions:
Figure 10.1 A linear MIMO filter.
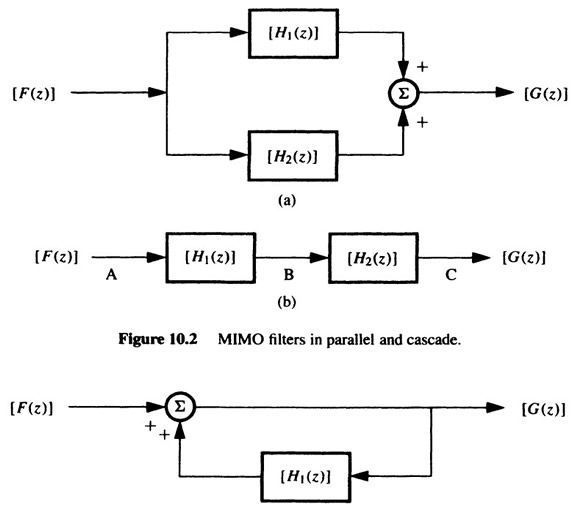
Each output is a linear combination of filtered versions of all the inputs. The transfer function from input j to output i is Hij(z). A schematic diagram of [H(z)] is shown in Fig. 10.1(a). The signal path from input line j to output line i is illustrated in Fig. 10.1(b). A block diagram of the MIMO filter is shown in Fig. 10.1(c). The input vector is [F(z)]. The output vector [G(z)] is equal to [H(z)][F(z)]. The overall transfer function of the system is [H(z)]. Other configurations of MIMO filters are shown in Fig. 10.2. Filters [H1(z)] and [H2(z)] are in parallel in Fig. 10.2(a). The input signal for this system is [F(z)]. The output signal is the sum of two signals, [H1(z)][F(z)] and [H2(z)][F (z)]. The output is [H1(z) + H2(z)][F(z)]. The transfer function of this system is therefore equal to [H(z)] = [H1(z) + H2(z)]. In Fig. 10.2(b), [H1(z)] and [H2(z)] are in cascade. Following signals through this system yields certain facts. The signal at the input node A is [F(z)] and the signal at node B is [H1(z)][F(z)]. The signal at the output node C is [H2(z)][H1(z)][F(z)]. The transfer function of this system is therefore equal to [H(z)] =[H2(z)][H1(z)]. This is the product of the matrix transfer functions, in reverse order to the signal flow. In Fig. 10.3, a system with a feedback self-loop is shown. To find the transfer function of this system, we note that the output [G(z)] can be expressed as
Combining terms,
Figure 10.3 A MIMO feedback loop.
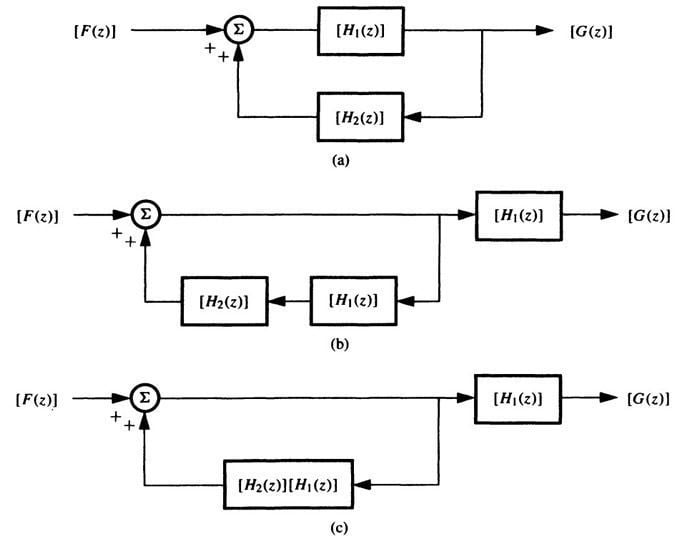
The transfer function of the system is therefore Another MIMO feedback system is shown in Fig. 10.4. This system can be reduced to find the transfer function by following a number of steps, illustrated in Figs. 10.4(a), 10.4(b), and 10.4(c). The original system is shown in Fig. 10.4(a). The input is [F(z)] and the output is [G(z)]. The diagram is redrawn in Fig. 10.4(b), with the same input causing the same output. The self-loop is the cascade of two branches whose transfer functions are combined in reverse order in Fig. 10.4(c). The overall transfer function may now be obtained by inspection, since the system is reduced to a cascade of a self-loop and a branch [H1(z)]. Taking transfer functions of this cascade in reverse order, the overall transfer function is
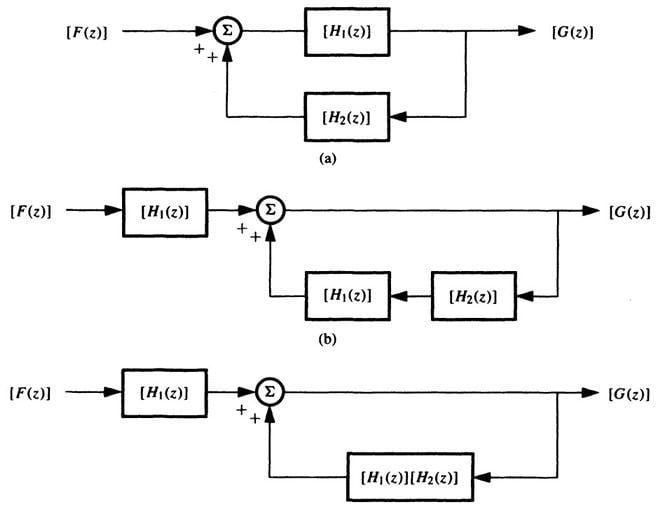
The same system can be reduced in another way, as illustrated in Fig. 10.5. The original system is shown in Fig. 10.5(a). A step in the reduction is shown in Fig. 10.5(b). Once again, the input [F(z)] produces the output [G(z)]. The self-loop is simplified in Fig. 10.5(c), and the transfer function can be written by inspection as
Figure 10.4 Reduction of a MIMO feedback system: (a) Original system; (b) Equivalent system; (c) Simplified equivalent system.
Equation (10.9) is an identity, as the reader can easily verify. One more example will help to solidify our understanding of MIMO systems. Figure 10.6 shows a system with two feedback loops. The original system is shown in Fig. 10.6(a). The two feedback loops become self-loops in Fig. 10.6(b) without any changes to the input-output transfer function. The self-loops are simplified in Fig. 10.6(c), and their transfer functions are summed in Fig. 10.6(d). From here, the transfer function can be written by inspection as
With this brief introduction, we are now prepared to develop adaptive inverse controls for MIMO systems.
Figure 10.5 Reduction of a MIMO feedback system by another approach: (a) Original system; (b) Equivalent system; (c) Simplified equivalent system. |