Introduction
Gauss elimination is the most familiar method for solving simultaneous equations. It consists of two parts: the elimination phase and the solution phase. As indicated in Table 2.1, the function of the elimination phase is to transform the equations into the form Ux= c. The equations are then solved by back substitution. In order to illustrate the procedure, let us solve the equations
| (a) | 
|
| (b) | 
|
| (c) | 
|
Elimination phase The elimination phase utilizes only one of the elementary operations listed in Table 2.1 multiplying one equation (say, equation j) by a constant ? and subtracting it from another equation (equation i). The symbolic representation of this operation is
| (2.6) | 
|
The equation being subtracted, namely Eq. ( j), is called the pivot equation.
We start the elimination by taking Eq. (a) to be the pivot equation and choosing the multipliers ? so as to eliminate x 1 from Eqs. (b) and (c):
After this transformation, the equations become
| (a) | 
|
| (b) | 
|
| (c) | 
|
This completes the first pass. Now we pick (b) as the pivot equation and eliminate x 2 from (c):
which yields the equations
| (a) | 
|
| (b) | 
|
| (c) | 
|
The elimination phase is now complete. The original equations have been replaced by equivalent equations that can be easily solved by back substitution.
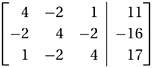
As pointed out before, the augmented coefficient matrix is a more convenient instrument for performing the computations. Thus the original equations would be written as
and the...