Servo Motor Working Principle
Servo motors (or servomotors) are among the most efficient motors used in various industries today. These motors basically allow the precise control of an object’s linear or angular position, velocity, and acceleration, making them ideal for many jobs other motors can’t do (for example, automation in factories and robotics).
But as simple as servo motors might appear to be, there is more to their operation than meets the eye. For instance, servo motors have a unique working principle and come in several different types and capabilities.
Servo motors are among the most efficient motors used in several industries today.

Source: [Surasak/Adobe Stock]
Servo motor working principleA servo motor is a part of a closed-loop system consisting of a motor (AC or DC), a gear system, a position sensor (usually a potentiometer), and a control circuit. The motor is connected to the gear system, which reduces the motor speed, increases torque, and provides feedback to the potentiometer.
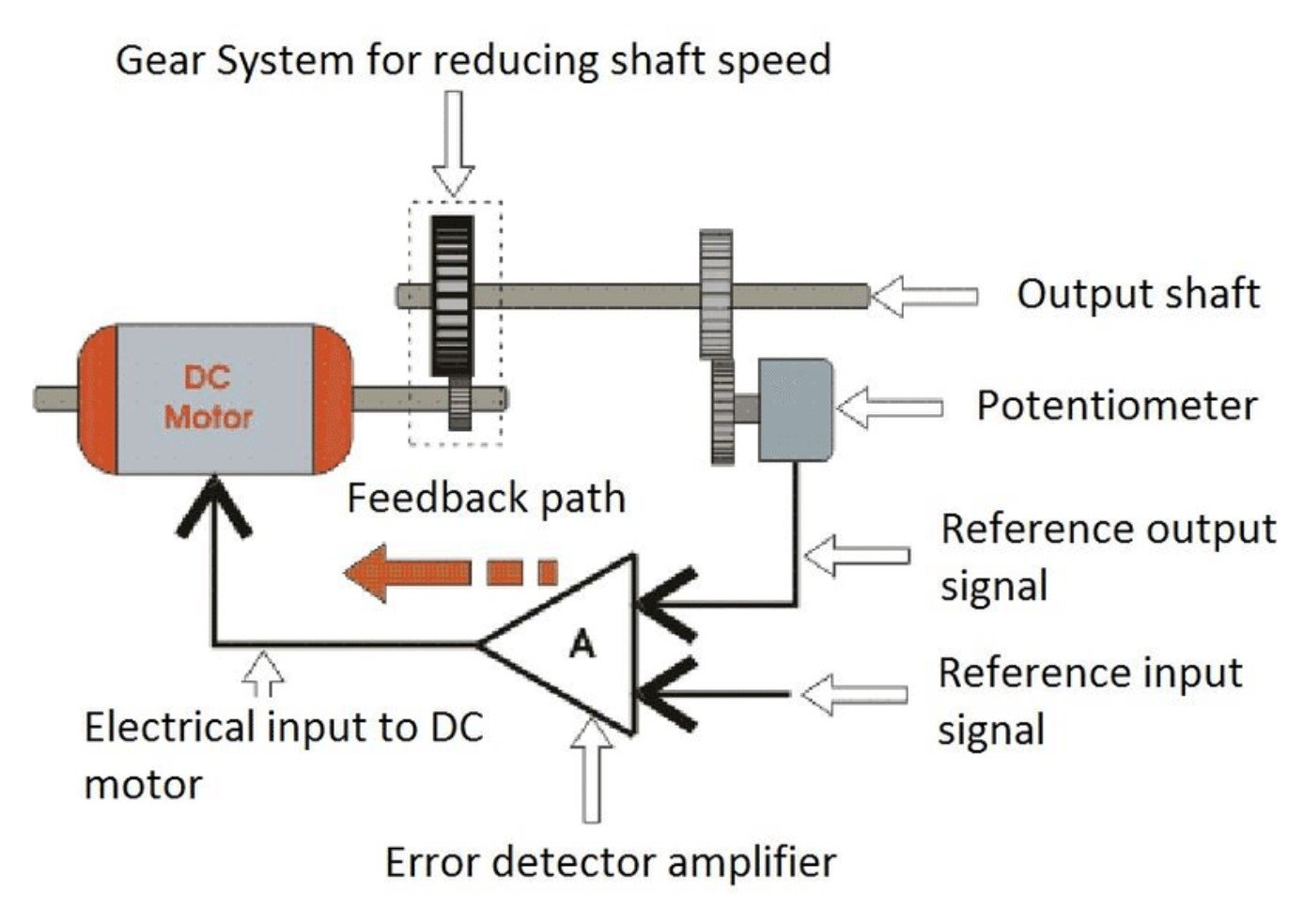
Figure 2: The principle of operation for DC servo motor
Source: https://www.researchgate.net/figure/The-principle-of-operation-for-DC-servo-motor_fig32_311714269
This potentiometer converts the feedback signal into an electrical signal and feeds the information into the control circuit. The control circuit then decodes the signal and compares it with the desired position before it controls the motor’s rotation precisely to achieve the desired position.
Controlling servomotors: The pulse width modulation techniqueThe control of servo motors is usually achieved using the pulse width modulation (PWM) technique, which involves varying the width of the pulse applied to the motor for a fixed amount of time.
To better understand how pulse width modulation works, consider a variable DC power source connected to a 12V motor and switch. If the switch is powered on and off quickly enough, the motor will rotate at some speed between zero and its full speed. This mode of operation ensures that the power (or electrical signals) supplied to the motor is in a series of pulses, as shown in Figure 3 below:
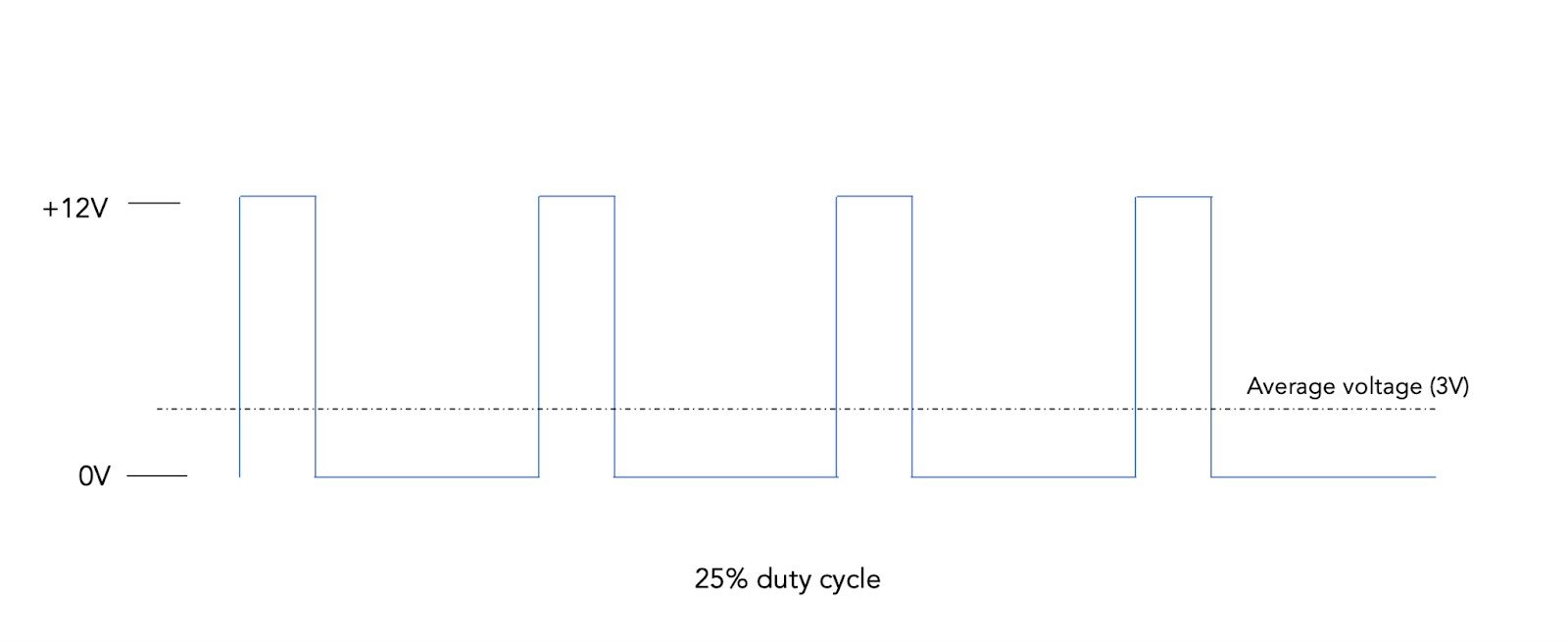
Figure 3: Pulse width modulation signal with a duty cycle of 25%
Source: Temitayo Oketola
The pulse width (or the period for which the switch is closed) determines the angular position of the motor. For instance, consider a scenario in which a pulse is sent every 20 milliseconds, as shown in Figure 4. In such a scenario, a pulse width of 1000μs will cause the motor shaft to rotate at -90º, while pulse widths of 1500μs and 2000μs will move the shaft to its neutral position and +90º, respectively.
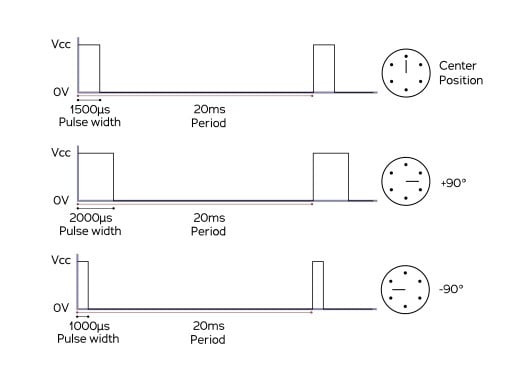
Figure 4: Servo motor timing
Source: Hforesti/CC[SA][3.0]
Learn more about servo motor control on GlobalSpec.
Types of servo motorsThere are two main types of servo motors based on their current type.
As its name implies, a DC servo motor operates using direct current. This type of servo motor features a DC source separately in the armature field winding and is typically controlled by altering the field current or armature current. DC servo motors quickly respond to signals, but they usually require more maintenance.
AC servo motors are controlled by alternating current and are designed to handle higher current surges than DC servo motors. In addition, they can achieve more torque and offer better control than their DC counterpart. These advantages make them ideal for heavy pieces of machinery, including CNC machines and robotic arms.
Differences between servo motors and stepper motorsA servomotor operates in a closed-loop control system, whereas a stepper motor operates in an open-loop control system. In servo motors, the shaft’s speed, position, and torque are controlled using a feedback system. Stepper motors do not use feedback systems. Instead, they operate solely based on the command they are given.
Stepper motors usually run at high torque and low speeds and are suited for short-distance movements. In contrast, servo motors typically run at high speeds and generally produce more torque at a specified speed than stepper motors. See the mathematical relationship between a stepper motor’s speed and torque below.
Learn more about stepper motors on GlobalSpec.
Servo motor applicationsServo motors are used in various industries for precision control. Here are some of their most common applications today:
- Robotics: servomotors are used in the robotics industry to control the angular movement and locations of the robotic arms.
- Packaging Industries: packaging machines use servo motors to control the movement of timing belts and other machine parts.
- Automatic doors: servo motors control the opening and closing of automatic doors used in supermarkets and hospitals.
- Automobile industry: servomotors are used to maintain vehicle speed.
However, the desirable performance of servo motors primarily depends on whether they are correctly sized for a particular application. Therefore, engineers are advised to discuss their application needs with servo motor suppliers.







