Linear Motor Working Principle
Understanding linear motor working principle, construction, and application
Most electric motors available today convert electric energy into rotational mechanical energy. Unfortunately, engineers looking to achieve linear motion with these motors typically use a combination of gears, chains, or belts, all of which generate noise and increase maintenance costs.
Linear motors are one of the few motors solving this challenge: they produce rectilinear motion while allowing engineers to directly couple the load to the motor and eliminating the need for gearboxes. Their basic principle was discovered in 1895, but practical devices were not developed until 1947. These motors are now used in machines that require rectilinear motion, like beltless conveyors and overhead traveling cranes.
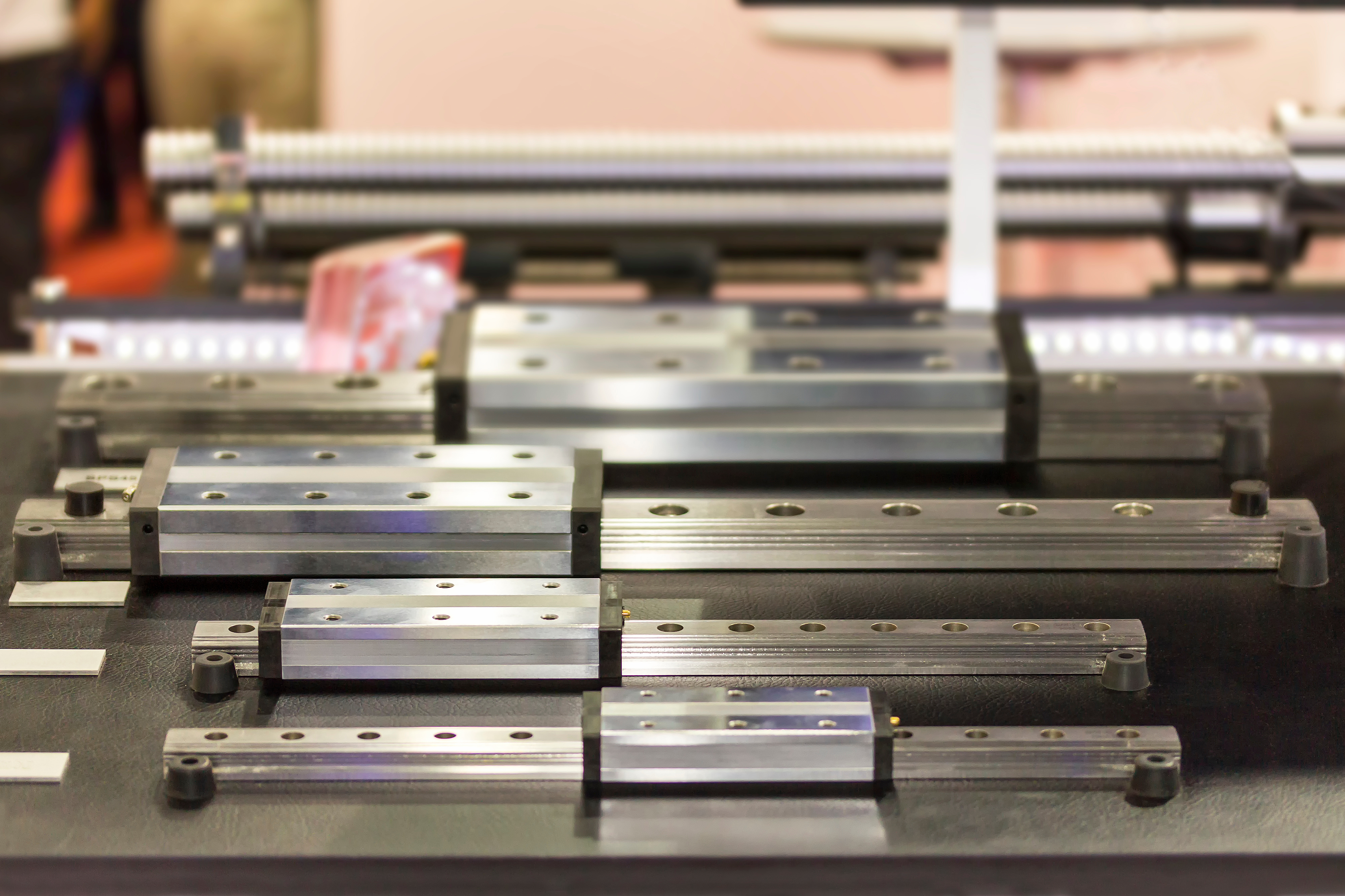
Figure 1: Linear motors are now used in machines that require rectilinear motion
Source: [SurasakAdobe Stock]
What is a linear motor?A linear motor, also called a direct drive unit, is a type of motor that generates rectilinear motion. This motor is quite an engineering marvel, as it obeys the fundamental laws guiding the operation of conventional rotational motors while providing higher accuracy, repeatability, and versatility of operation.
Linear induction motor design and constructionThe construction of a linear motor is quite similar to a three-phase induction motor. For instance, imagine that the stator of the induction motor is cut and spread out flat, as shown in Figure 2. This forms the primary of the linear motor system. Likewise, if the rotor is cut and spread out flat, it forms the system's secondary. As a result, the primary and secondary of a linear motor are flat and appear in the form of a sheet.
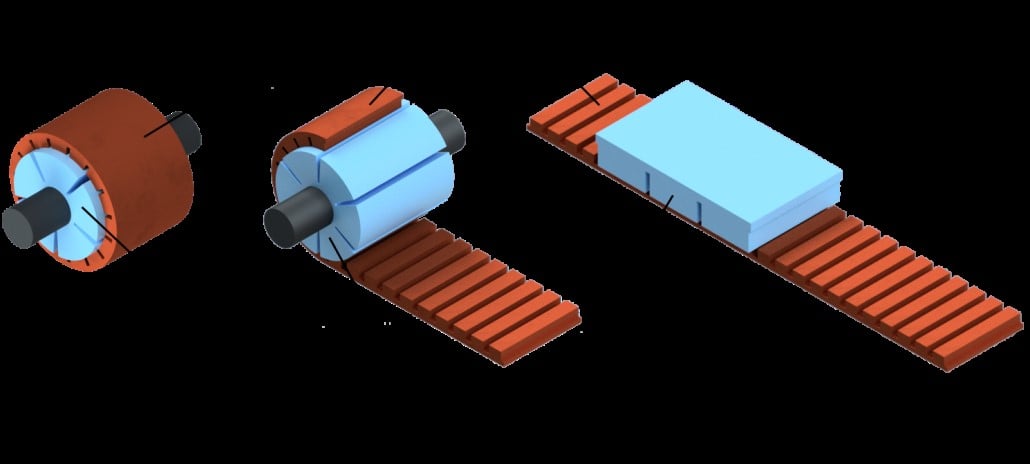
Figure 2: Basic construction and working principle of a linear motor
Source: www.intrasys-gmbh.com/
The primary or secondary of a linear induction motor could be made mobile. However, the stationary member must be continuous throughout the length of the intended travel. In addition, the more common linear induction motor construction has the primary placed on both sides of the secondary. This motor variant provides better traction and efficiency than single-sided linear motors.
Learn more about linear motor construction on GlobalSpec.
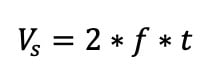
Linear motor working principleWhen the primary of a linear induction motor is energized from a three-phase power supply, it causes magnetic flux to travel along the primary’s entire length. This linear magnetic field is equivalent to the rotating magnetic field in three-phase induction motors or synchronous motors. Therefore, its speed can be calculated using:
Where:
Vs = linear synchronous speed
t = pole pitch (m)
f = AC supply frequency (Hz)
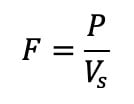
As a result of the relative motion between the magnetic flux and the conductor of the secondary, electric current is induced in the secondary (or rotor plate) to produce linear force or thrust. The magnitude of the thrust can be calculated using:
Where:
P = rotor input power
Vs = linear synchronous speed
However, as is the case in rotary induction motors, the rotor plate cannot catch the speed of the traveling magnetic field. Therefore, there will always be a slip in linear motors. The actual linear speed of a linear motor can be calculated using:
Where:
V = linear motor speed
Vs = velocity of the traveling magnetic field
s = slip
Linear motors have several advantages over conventional induction motors for rectilinear motion. For instance, a linear motor’s moving part rides above the track on a cushion of air, eliminating energy losses due to friction and vibration. This is not the case with conventional motors where intermediate gearboxes are used to convert rotational motion into rectilinear motion.
In addition, since acceleration and braking are achieved through electromagnetism, linear motors are quieter in operation than conventional induction motors.
Application of linear motorsLinear motors can deliver unlimited strokes with feedback while achieving an accuracy of ±1μm/100 mm. They can also operate at speeds of up to 1000 inches per second, making them ideal for semiconductor manufacture and assembly applications. Engineers will also find linear motors in machine tools, material handling, general automation, and automotive applications.
However, engineers might experience challenges when using conventional linear motors to levitate (or move) heavy loads like a train. These applications require enormously powerful electromagnets since heavy loads consume substantial electric power. Modern-day linear motors now feature superconducting magnets, which helps solve this challenge.
These superconducting electromagnets are cooled to low temperatures using liquid helium or nitrogen, causing them to have almost zero electric resistance. As a result, the electromagnets become superconductors and reduce power consumption considerably.
Linear motor selection: Engineers should reach out to manufacturersLinear motors can meet the requirements of several applications so long as they are correctly selected for an application. Therefore, engineers are advised to reach out to linear motor suppliers to discuss their application needs.







