Stepper Motor Working Principle
Stepper motors are among the most common electrical motors used in several applications today. These motors have a unique design that converts electrical power into the precise angular movement of the motor shaft (also called steps). This makes them ideal in applications that require precise positioning like robotic arms, antennas, and telescopes.
However, while seemingly simple, there is more to stepper motors than meets the eye. For instance, these motors have a more complex working principle than conventional motors. They also come in different designs and configurations, each type having its achievable resolution, speed, torque, and suitability for different application needs.
Figure 1: Stepper motors come in different designs and configurations, each type having its suitability for different application needs.
Source: [den45fotoAdobe Stock]
Stepper motor working principleAs with all electric motors, stepper motors feature two basic components: the stator (or stationary part) and the rotor (or moving part). The stator of stepper motors is typically made of several teeth on which coils are wound, while the rotor is usually a permanent magnet or variable reluctance iron core.
To understand how stepper motors work, consider Figure 2, which shows a simple stepper motor with six stator poles (or three stator pole pairs). By energizing one (or more) of the stator pole pairs using pulsating electric current, the pole becomes magnetized, creating electromagnetic poles in the process. These energized poles pull the rotor around in one step, causing it to align with this magnetic field.
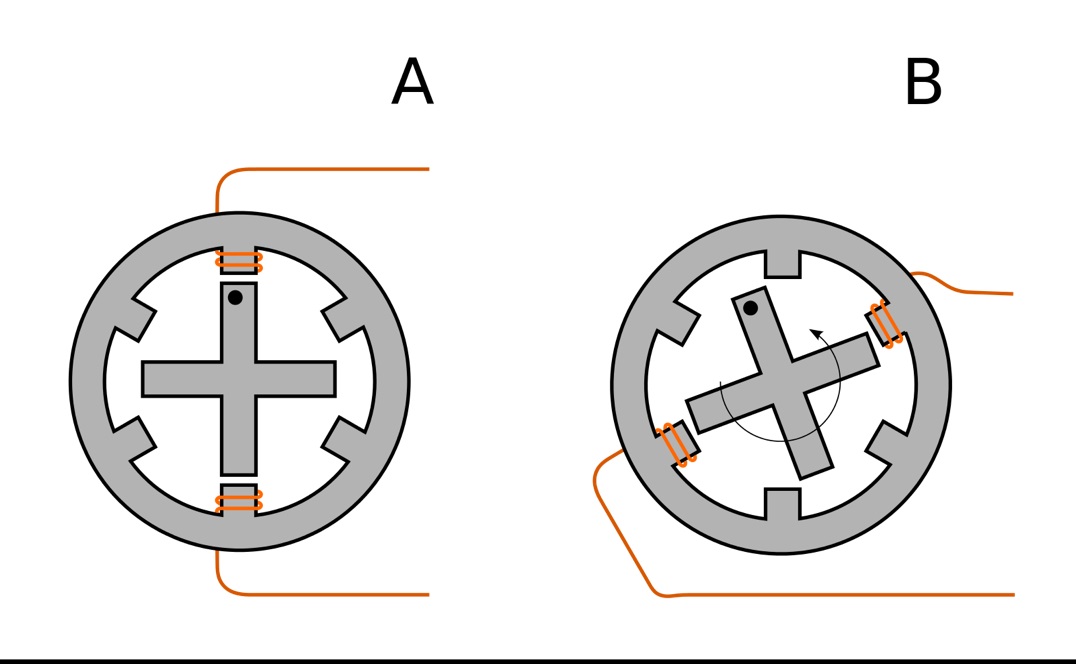
Figure 2: Stepper motor working principle
Source: Harkonnen2 CC[SA][3.0]
Therefore, by supplying pulsating electric current to different stator phases, the rotor can rotate by a specific amount to reach the desired final position. The achieved rotation angle primarily depends on the step angle and number of pulses, according to the formula:

Step angle is the angle the stepper motor rotates when one pulse is applied to the input. It is measured in º/step.
Stepper motor types by constructionAlthough all stepper motor designs feature stators and rotors, stepper motors have different rotor and stator configurations. For instance, stepper motors can be classified according to their rotor construction into:
- Permanent magnet rotors
- Variable reluctance rotors
- Hybrid rotors
This type of stepper motor uses permanent magnets on the rotor. This rotor creates opposite polarity poles (north and south poles), producing magnetic flux that aligns with the magnetic field generated by the stator circuit. Stepper motors with permanent magnet rotors offer high torque and can achieve step angles between 1.5° and 30°.
Variable reluctance rotorsStepper motors with variable reluctance rotors have a free-moving multi-tooth rotor made of an iron core. This unique rotor design causes the rotor teeth to rotate (and align) with the stator poles when the stator circuit is energized. Stepper motors with variable reluctance rotors can achieve high speed and step angles ranging from 7.5° to 30°.
Hybrid rotorsHybrid rotors are a combination of permanent magnet rotor and variable reluctance rotor designs. Their rotors have two caps with alternating teeth, providing a better path to guide and utilize magnetic flux than permanent magnet rotors. Hybrid motors have high resolutions, producing step angles as small as 0.5°. They also produce higher speed and torque compared to other stepper motors.
Stator configurationsStepper motors can also be classified according to the characteristics of their stator circuit, like the number of phases (or the number of independent coils) and pole pairs. Stepper motors usually have two phases, but three- and five-phase motors also exist.
Learn more about stepper motor types on GlobalSpec.
Stepper motor controlThe operation of stepper motors primarily depends on the stator coil being energized (in a particular sequence) to generate the magnetic field that causes the rotor to align. Therefore, engineers typically control stepper motors by controlling the electrical supply to the coil using a combination of electrical devices:
- Transistor bridge
- Pre-driver
- Microcontroller unit
A transistor bridge controls the motor coil’s electrical connection to the electrical supply. As such, they allow the flow of current in the coil, thus controlling the stepper motor. The pre-driver controls the activation of these transistors. Likewise, the pre-driver is controlled by the microcontroller unit.
Learn more about microcontrollers on GlobalSpec.
Stepper motor driving modesStepper motors typically function in several modes, including full step, half step, and micro-step modes.
In the full-step mode, the rotor proceeds through 200 distinct steps (1.8° per step) for each 360° rotation of the motor shaft. This mode is usually achieved by energizing two phases of the stator simultaneously. The full-step mode achieves the full rated torque at each motor position but has a lesser angular resolution than other driving modes.
The half-step mode allows the rotor to proceed through 400 distinct steps (0.9° per step) for each complete revolution of the motor shaft. Engineers can achieve this mode by alternating between energizing two phases on the stator. However, while this driving mode offers high angular resolution, it comes at the expense of torque.
In the micro-step mode, the rotor proceeds in fractions of a full step, such as 1/4, 1/8, 1/10, 1/16, and 1/256 of a full step. For instance, in the 1/256 micro-stepping mode, the rotor proceeds through 51,200 distinct steps (0.007° per step) for each 360° rotation of the motor shaft. This mode is ideal in applications where highly accurate positioning and control are needed, such as robotics.
Stepper motor selection: Engineers should reach out to stepper motor suppliersStepper motors are essential devices in applications that require precise position and control. However, the success of a stepper motor for an application primarily depends on engineers correctly choosing and sizing the motor. Therefore, engineers are advised to reach out to stepper motor manufacturers to discuss their application needs.







