Stepper Motor Calculations
3D printers and CNC (computer numerical control) machines have completely revolutionized the manufacturing industry. These technologies rely on computerized instructions and specialty motors to control machine tools and workpieces, and in turn, create parts accurately and precisely while meeting tight tolerance requirements.
Stepper motors are among the most commonly used motors for 3D printers and CNC machines due to their high accuracy, precision, and low cost . Unlike conventional motors, stepper motors move in discrete angles (also called steps), allowing precise positioning and control of the spindle shaft and machine table. But the performance of these motors primarily depends on how accurately they are sized(or specified) for the machining technology.
This article presents key stepper motor calculations that engineers must know, including stepper motor steps per mm, steps per revolution, and motor torque. It will also present some key factors that engineers need to consider when specifying stepper motors.
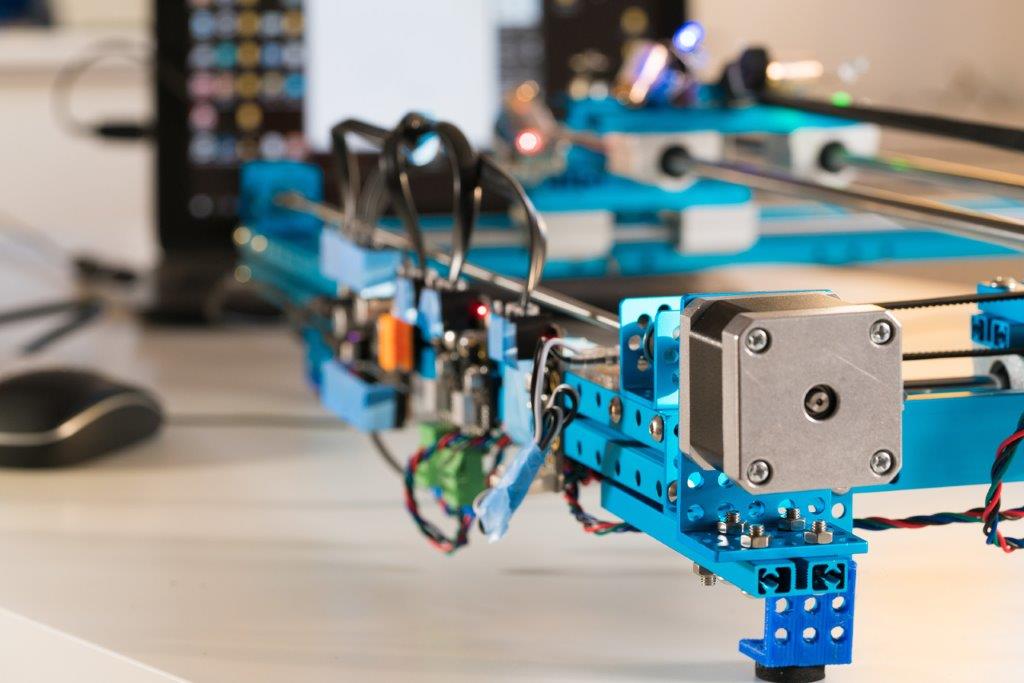
Stepper motors are used in various devices, including 3D printers, CNC machines, and precision positioning equipment.
© [luchschenF] / Adobe Stock
How do Stepper Motors Work?Stepper motors consist of a rotor (usually a permanent magnet) surrounded by the stator's windings. Once pulsing electrical current is made to pass through the windings, it magnetizes the stator and makes electromagnetic poles, causing precise one-step movements of the rotor.
Each stepper motor pulse moves the rotor through one precise increment of a turn, for example, 1.8° , 0.9°, and so on. 200 pulse steps will be required to make one full revolution for a stepper motor that rotates in 1.8° increments. In contrast, 400 steps will be required for a stepper motor that moves in 0.9° increments.
But more often than not, CNC machines and 3D printers often demand smaller step angles to meet stringent manufacturing requirements. To achieve this, stepper motor manufacturers usually modify their motor’s electric circuit and algorithm so that the motor’s microcontroller sends only partial pulses to the stepper motor.
These partial pulses cause the motor to spin only in a fraction of a step (also called microsteps), allowing designers to achieve up to 64 microsteps per one full step.
[Learn more about stepper motors selection with Engineering360]
Steps Per mm Calculator: Microcontrollers are Vital to the Performance of Stepper MotorsStepper motors play a significant role in the precise positioning and control of machining tools and machine tables. But behind the successful operation of stepper motors is a microcontroller (or controller). These controllers are responsible for commanding the stepper motor(and the stepper motordriver) to move forward or backward one increment at a time.
Microcontrollers typically achieve this by calculating how many electrical pulses need to be sent to the motor drive to move the machine’s axis by, say, one millimeter. It is quite easy to calculate steps per mm as long as the designer knows the stepper motor's type of drive.
For leadscrew driven systems, the “stepper motor’s steps per mm is expressed as:

Or

Where:
N=number of turns that the leadscrew must travel to move 1 mm
p=leadscrew pitch
For belt-driven systems, the “stepper motor’s steps per mm is expressed as:

Where:
p=belt pitch (mm)
Consider an example of a leadscrew-driven motor with 6 turns per mm, 1/16 microstepping, and 1.8° per step (200 steps per revolution) used to move a CNC machine table along the z-axis. By calculating the z-axis steps per mm, engineers would obtain 19200 steps per mm, as shown below:

Engineers can also use the stepper motor calculators available on motor manufacturers’ websites for calculating steps per mm.
Stepper Motor Speed CalculatorThe stepper motor speed can be estimated using:

Note: the stepper motor speed is measured in revolutions per second, and the pulse rate of the stepper motor is measured in steps per second.
Keep in mind that the stepper motor speed obtained from this formula is measured in revolutions per second. Therefore, to measure the stepper motor speed in the more common “revolutions per minute” convention, engineers should simply multiply the result from the equation by 60, as shown below:

Consider an example of a stepper motor with a command pulse rate of 20 steps per second and a step angle of 1.8°. To estimate the stepper motor’s speed, engineers would first have to calculate the motor’s number of steps in one revolution (360°) . This can be obtained below:
By introducing this value into the stepper motor speed equation, engineers would obtain 6 rpm (or 0.1 revolutions per second).
Stepper Motor Calculations: Engineers Should Reach Out to ManufacturersStepper motors have their place not only in the world of CNC machines and 3D printers, but they are also vital components in robots, product automation and packaging machinery, cameras, and precision positioning equipment. This broad range of applications is primarily because of stepper motors ’ desirable accuracy, precision, and low cost.
However, these advantages will only be felt if engineers correctly specify and size stepper motors for their application requirements.
While this article provides helpful information about stepper motor design, engineers are advised to reach out to stepper motor manufacturers to discuss their application requirements.







