Linear Motors Information
Last revised: November 19, 2024
Reviewed by: Scott Orlosky, consulting engineer
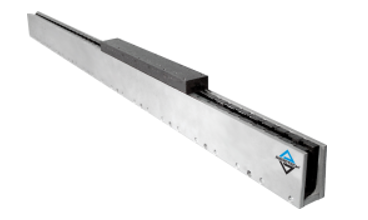
Linear motors generate force only in the direction of travel. A linear motor applies thrust directly to a load, and does not require any intermediate mechanism to convert rotary motion into linear motion. Linear motors are capable of extremely high speeds, accelerations, and accurate positioning.
Types
Choices for linear motors include:
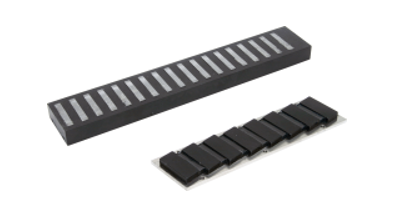
- Moving coil — In a moving coil design the coil moves and the magnet is fixed, such as an audio speaker.
- Moving magnet — In a moving magnet design the magnet moves and the coil is fixed.
- AC synchronous design — AC synchronous motors are a class of motors that operate at constant speed up to full load. The rotor speed is equal to the speed of the rotating magnetic field of the stator; there is no slip. Reluctance and permanent magnet are the two major types of synchronous motors. Synchronous linear motors are often used where the exact speed of a motor must be maintained.
- AC induction or traction design — AC induction or traction design motors are a class of motors that derives its name from the fact that current is induced into the rotor windings without any physical connection with the stator windings (which are directly connected to an AC power supply); adaptable to many different environments and capable of providing considerable power as well as variable speed control. Typically there is "slip," or loss of exact speed tracking with induction motors. Typically rolled flat version of rotary AC induction motors.
- Linear stepping design — Stepper motors use a magnetic field to move a rotor in small angular steps or fractions of steps. Stepper motors provide precise positioning and ease of use, especially in low acceleration or static load applications.
- DC brushed design — Brush motors have the armature windings on the rotor. The magnetic fields are commutated via direct contact of brushes with the rotor commutator.
- DC brushless design — Brushless linear motors have their armature windings on the stator and the field on the rotor. They rely on internal noncontact sensing devices to activate external commutating electronics.
Specifications
Performance Specifications
Important performance specifications to consider include:
- Rated continuous thrust force — The maximum rated current that can be supplied to the motor windings continuously without overheating.
- Peak force — The maximum force of the linear motor for a short duration
- Nominal stator length — The length of the fixed magnet or coil.
- Slider or carriage travel — The range of travel of the moving coil or magnet.
- Slide or carriage width and length — The dimensions of the moving coil or magnet.
- Maximum speed
- Maximum acceleration
Electrical Properties

Important electrical properties to consider when specifying linear motors include:
- Rated current per phase — The maximum rated current per phase or winding for a stepper motor.
- Number of leads — Specifically unipolar = 6 leads, and bi-polar = 4.
- Continuous current
- Motor force constant
Mechanical Properties
Mechanical properties to consider for linear motors include:
- Linear stepper resolution — Units are typically in 'distance per step' or 'steps per unit distance'.
- Design units
- Maximum coil temperature
- Moving coil versus stationary coil
- Channel design
- Cable Management
Features
Common features include:
- Forced air-cooling
- Water-cooling
- Balanced design
- Integral position feedback
- Modular stator
- Brush or brushless design
Environmental Parameters
Important environmental parameters to consider for linear motors include:
- Operating temperature
- Maximum shock
- Maximum vibration
- Presence of magnetic particulates
Linear Motors FAQs
What are the advantages of using linear motors over other systems?
Linear motors have a simple structure with two main components: the primary (with electromagnets) and the secondary (with permanent magnets or magnet-free). This simplicity eliminates the need for servomotors, resolvers, tachometers, couplings, pulleys, timing belts, ball screws, nuts, support bearings, and lubrication systems.
Linear motors provide high positioning accuracy and repeatability due to the absence of mechanical backlash. They use magnetic or optical linear scales for position feedback, which offers more accurate readings compared to rotary encoders used in ball screws.
Linear motors operate without mechanical transmission components, making them essentially frictionless. This results in theoretically unlimited service life and eliminates mechanical wear.
They can achieve very high accelerations and speeds, limited only by the inertia of the moving parts. This makes them suitable for applications requiring rapid motion.
Linear motors provide backlash-free positioning and contactless operation, which reduces mechanical wear and enhances reliability.
The design of linear motors allows for flexibility, as the primary sections can be either stationary or moving, making them adaptable to various applications.
Systems using linear motors are compact and have a low component count, which boosts reliability and allows them to fit into smaller spaces.
While linear motors offer these advantages, it's important to consider factors such as cost, force capabilities, and thermal management when selecting them for specific applications.
How do linear motors operate?
Linear motors operate by directly converting electrical energy into linear motion. They do not require gear sets, belts, or screws to change motor rotation into a linear movement.
A linear motor consists of two main components: the primary and the secondary. The primary contains electromagnets, while the secondary can either have permanent magnets or be magnet-free.
Linear motors operate without mechanical transmission components, making them essentially frictionless. This results in a theoretically unlimited service life and eliminates mechanical wear.
Linear motors use magnetic or optical linear scales for position feedback, which provides more direct position readings compared to rotary encoders used in ball screws, subject to mechanical backlash. This translates to positioning accuracy and repeatability.
They can achieve very high accelerations and speeds, as there are no mechanical parts to limit these capabilities. The only limitations are the linear bearings, inertia, and the speed at which the motor can be commutated.
The design allows for flexibility, as the primary sections can be either stationary or moving, making them adaptable to various applications.
Overall, linear motors offer a highly efficient and precise solution for motion control tasks, providing advantages such as high speeds, accuracy, and reduced mechanical complexity.
What are some common applications of linear motors?
Linear motors are versatile components used in a variety of applications due to their unique advantages such as high precision, nearly frictionless operation, and direct drive capabilities. Here are some common applications of linear motors:
Precision Positioning Systems
Linear motors are often used in systems requiring precise positioning and high dynamic response, such as semiconductor manufacturing equipment and precision machining tools.
High-Speed Automation
They are ideal for high-speed automation tasks, including pick-and-place machines and packaging systems, where rapid acceleration and deceleration are crucial.
Transportation Systems
Linear motors are employed in magnetic levitation (maglev) trains and other transportation systems that benefit from their frictionless and contactless operation.
Multi-Axis Stages
In applications like multi-axis stages, linear motors provide compact and reliable solutions, fitting into smaller spaces and reducing component count.
Robotics
Robotics applications often utilize linear motors for their high precision and repeatability, especially in tasks that require smooth and accurate linear motion.
Medical Equipment
Linear motors are used in medical devices that require precise and controlled movements, such as MRI machines and surgical robots.
What are the limitations of using linear motors?
Linear motors, while offering numerous advantages, also have certain limitations that should be considered when selecting them for specific applications.
Linear motors can be more expensive than traditional mechanical solutions like ball screws or belts. This higher cost can be a significant factor in applications where budget constraints are critical.
Linear motors typically cannot produce as much force as some other types of solutions, such as ball screws. This limitation might affect their suitability for applications requiring high force output.
Heating from I²R losses is a concern with linear motors, which may require special cooling considerations to prevent overheating and ensure reliable operation.
Linear motors demand better response from controllers, including increased bandwidth and higher update rates. This can necessitate more advanced and potentially costly control systems.
While linear motors offer design flexibility, they still require careful consideration of space and clearance, especially in compact or constrained environments.
What is the design flexibility of linear motors?
Linear motors offer significant design flexibility, which makes them adaptable to a wide range of applications. Here are some aspects of their design flexibility:
Stationary or Moving Primary Sections
The design of linear motors allows for the primary sections to be either stationary or moving. This flexibility enables them to be tailored to specific application requirements, whether the application demands a stationary or a moving primary component.
Direct Drive System
Linear motors provide direct linear motion without the need for mechanical transmission components. This direct drive capability allows for more straightforward and compact designs, avoiding the complexities and space requirements associated with rotary-to-linear conversion systems.
Compact and Reliable
Systems using linear motors are more compact due to their lower component count, which enhances reliability and allows them to fit into smaller spaces. This is particularly beneficial in applications like multi-axis stages, where space is a constraint.
Adaptability to Various Applications
The inherent design flexibility of linear motors makes them suitable for a wide range of applications, from precision positioning systems to high-speed automation and robotics. Their ability to provide high precision and nearly frictionless operation further enhances their adaptability.
What are the cooling solutions available for linear motors?
When it comes to cooling solutions for linear motors, there are several methods that can be employed to manage the heat generated during operation. Here are some of the cooling solutions available:
Cold Plates or Cooling Jackets
These are used to dissipate heat from the motor. Cold plates can be attached to the motor to absorb and transfer heat away, while cooling jackets can encase the motor to provide a cooling effect.
Use of High-Temperature Materials
Fabricating the motor with materials that can withstand higher temperatures can help in managing heat. This approach is often combined with direct cooling methods to ensure the motor operates within safe temperature limits.
Temperature Monitoring Systems
Installing temperature sensors such as thermocouples or resistance thermometer devices (RTDs) can help monitor the motor's temperature. These sensors can provide feedback to modulate motor power and keep the temperature within a safe range.
Advanced Cooling Systems
In some cases, advanced cooling systems like those using liquid nitrogen vapor can be employed. These systems are controlled by feedback mechanisms that monitor motor temperature and adjust cooling accordingly.
External Cooling for Hybrid Motors
Some hybrid linear motors use external cooling to boost output during continuous operation. This is particularly useful in applications where the motor is heavily loaded for extended periods.
These cooling solutions help ensure that linear motors operate efficiently and reliably, even under demanding conditions.
What are the benefits of using hybrid linear motors?
Hybrid linear motors offer several benefits that make them suitable for specific applications, particularly when balancing cost and performance. Here are some of the key benefits:
Hybrid linear motors are often more cost-effective compared to other types of linear motors. They utilize inexpensive ferromagnetic platens, which can make them a more economical choice for certain applications.
Despite their cost-effectiveness, hybrid linear motors can achieve servo-grade performance. This is accomplished through feedback mechanisms and a PID loop with positioning control, which helps in maintaining precise control over the motor's output.
Hybrid linear motors can exhibit cogging due to the coupling between the forcer and platen. However, solutions such as phase-teeth offset and driving for partial saturation of platen teeth and forcer teeth sections can mitigate this issue, enhancing the smoothness of operation. These are analogous to how stepper motors are controlled to avoid cogging.
Some hybrid linear motors can use external cooling to boost output during continuous operation. This feature is particularly useful in applications where the motor is heavily loaded for extended periods, ensuring reliable performance.
Linear Motors Media Gallery
References
GlobalSpec—High Performance Linear Motors
Image Credit: