Mathematics for Computer Graphics Applications, Second Edition

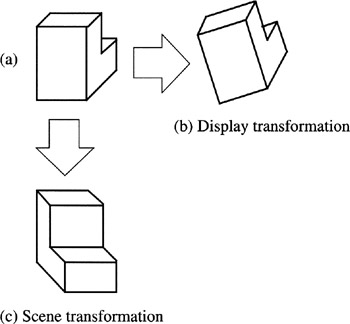
This diverse text features an introduction of the mathematics that is the foundation of many of today's most advanced computer graphics applications. This edition includes vectors, matrices, and transformations to present the geometry.