2.2 Multiple Eigenvalues and the Jordan Canonical Form
A multiple eigenvalue ? of algebraic multiplicity k can have one or several corresponding eigenvectors. The maximal number of linearly independent eigenvectors k g is called geometric multiplicity of the eigenvalue, which is less or equal to the algebraic multiplicity:
| (2.3) | 
|
If the algebraic and geometric multiplicities are equal ( k g= k), then the eigenvalue is called semi-simple. If there is a single eigenvector corresponding to ? ( k g=1), then the eigenvalue is called nonderogatory.
First, let us consider a nonderogatory eigenvalue ?. There exist linearly independent vectors u 0, ..., u k ?1 satisfying the equations
| (2.4) | 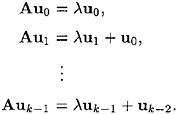
|
The vectors u 0, ..., u k ?1 are called the Jordan chain of length k, where u 0 is the eigenvector and the vectors u 1, ..., u k ?1 are associated vectors. Equations (2.4) can be written in the matrix form as
| (2.5) | 
|
where
| (2.6) | 
|
is an m k matrix, which is real or complex depending on the eigenvalue ?, and
| (2.7) | 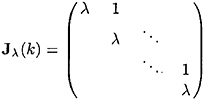
|
is a k k matrix called the Jordan block.
Let us consider an eigenvalue ? having several linearly independent eigenvectors (the derogatory eigenvalue), i.e., k g>1. In this case there are integers  such that
such that
| (2.8) | 
|
and linearly independent vectors  , satisfying the Jordan chain equations
, satisfying the Jordan chain equations
| (2.9) | 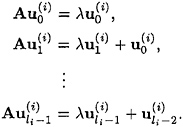
|
The numbers  are...
are...








