Discrete Stochastic Processes and Optimal Filtering
Concerned with the founding principles of optimal filters, this text presents several reminders about both random vectors and Gaussian vectors, and allows readers to tackle digital filtering.
DEFINITION. We say that a real r.v. is Gaussian, of expectation m and of variance ? 2 if its law of probability P X:
admits the density f X( x) 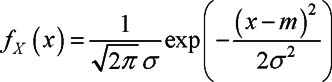 if ? 2 ? 0 (using a double integral calculation, for example, we can verify that
if ? 2 ? 0 (using a double integral calculation, for example, we can verify that ![]() f X( x) dx = 1);
f X( x) dx = 1);
is the Dirac measure ? m if ? 2 = 0.
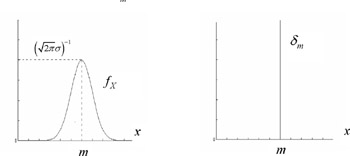
If ? 2 ? 0, we say that X is a non-degenerate Gaussian r.v.
If ? 2 = 0, we say that X is a degenerate Gaussian r.v.; X is in this case a "certain r.v." taking the value m with the probability 1.
EX = m, Var X = ? 2. This can be verified easily by using the probability distribution function.
As we have already observed, in order to specify that an r.v. X is Gaussian of m expectation and of ? 2 variance, we will write X ? N ( m, ? 2).
Characteristic function of X ? N ( m, ? 2)
Let us begin firstly by determining the characteristic function of X 0 ? N(0,1):

We can easily see that the theorem of derivation under the sum sign can be applied:

Following this by integration by...







