8.1.1 Introduction
In the preceding chapters, we studied the coherent fault trees (c-FT), that is, the FTs that can be described by the fundamental operators (OR and AND) and the monoform variables.
This logic is overtaken very fast in the case of the current complex systems, for example: regulation loops, maintenace specifications, etc.
Another family of FT deals with the non-coherent systems, which is called non-coherent FTs (nc-FTs), will form the subject of this chapter. A noncoherent FT, in its restrained form, is described by fundamental operators and contains biform variables. In the case of the nc-FT, we can make use of the NO-operator for representing a complemented variable (see Figure 8.1).
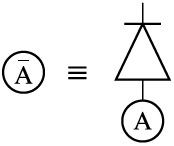 Figure 8.1: Equivalence of representations of a complemented event
Figure 8.1: Equivalence of representations of a complemented event The nc-FTs can also be represented by other operators, such as NOR, NAND. Subsequently, in Figures 8.2, 8.3 and 8.4, we will be giving the operators that are used the most in the case of FTs, and their equivalent representation in terms of AND, OR and NO-operators.
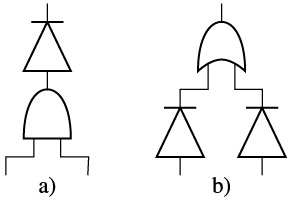 Figure 8.2: NAND operator (a) and its equivalent transformation (b)
Figure 8.2: NAND operator (a) and its equivalent transformation (b) 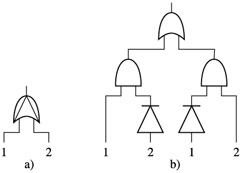 Figure 8.3: OR-exclusive operator (a) and its equivalent transformation (b)
Figure 8.3: OR-exclusive operator (a) and its equivalent transformation (b) 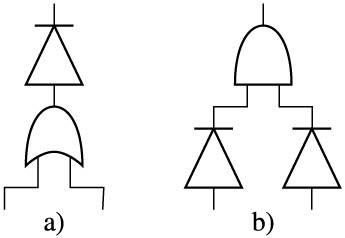 Figure 8.4: NOR operator (a) and its equivalent transformation (b)
Figure 8.4: NOR operator (a) and its equivalent transformation (b) With reference to the above transformations, it often happens that we have successions of NO-operators; we will reduce them as follows:
If the series contains n NO-operators, then we will replace them by a single NO-operator in the case where n is an odd number, and by...