12.2 FEATURE EXTRACTION
We will first discuss several examples of feature extraction, a process which usually involves projection of the measured feature vector (or its transform) by a vector inner product operation.
The simplest and most common optical feature extraction technique is the Fourier transform, illustrated in Fig. 12.3 and given (in polar form) by
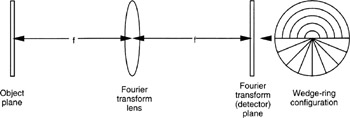 Figure 12.3: Fourier transform architecture employing a wedge-ring detector.
Figure 12.3: Fourier transform architecture employing a wedge-ring detector. A special output plane detector, called the wedge-ring detector, can be used to sample the output. Knowing that the output is symmetric about the origin means that the radial samples can be made on one half-plane and that the angular samples can be made on the other half-plane. By virtue of the wedge-ring sampling of the Fourier space, the wedge samples are scale-invariant and the ring samples are rotationally invariant. Since the detectors are square-law, the output is equivalent to the magnitude to the Fourier transform and hence translation-invariant.
Another transform that has, at least, scale invariance, is the Mellin transform, which was discussed in Chapter 10 with regard to matched filter/correlators. The 2-D Mellin transform is
where ( s x, s y) = 1, 2, 3, yield the zeroth, first, second, and so on, moments of f( x, y) along each axis.
Rather than show a particular Mellin transform example (since we have already covered that in Chapter 3), let us move on to the direct calculation of moments and show how it is done optically. Moments for...








