Preface
The first generation of fiber-optic communication systems debuting in 1980 operated at a meager bit rate of 45 Mb/s and required signal regeneration every 10 km or so. However, by 1990 further advances in lightwave technology not only increased the bit rate to 10 Gb/s (by a factor of 200) but also allowed signal regeneration after 80 km or more. The pace of innovation in all fields of lightwave technology only quickened during the 1990s, as evident from the development and commercialization of erbium-doped fiber amplifiers, fiber Bragg gratings, and wavelength-division-multiplexed lightwave systems. By 2001, the capacity of commercial terrestrial systems exceeded 1.6 Tb/s. At the same time, the capacity of transoceanic lightwave systems installed worldwide exploded. A single transpacific system could transmit information at a bit rate of more than 1 Tb/s over a distance of 10,000 km without any signal regeneration. Such a tremendous improvement was possible only because of multiple advances in all areas of lightwave technology. Although commercial development slowed down during the economic downturn that began in 2001, it was showing some signs of recovery by the end of 2004, and lightwave technology itself has continued to grow. The primary objective of this two-volume book is to provide a comprehensive and up-to-date account of all major aspects of lightwave technology. The first volume, subtitled Components and Devices, is devoted to a multitude of silica- and semiconductor-based optical devices. The second volume, subtitled Telecommunication Systems, deals with the design of modern lightwave systems; the acronym LT1 is used to refer to the material in the first volume. The first two introductory chapters cover topics such as modulation formats and multiplexing techniques employed to form an optical bit stream. Chapters 3 through 5 consider the degradation of such an optical signal through loss, dispersion, and nonlinear effects during its transmission through optical fibers and how they affect the system performance. Chapters 6 through 8 focus on the management of the degradation caused by noise, dispersion, and fiber nonlinearity. Chapters 9 and 10 cover the engineering issues related to the design of WDM systems and optical networks. This text is intended to serve both as a textbook and a reference monograph. For this reason, the emphasis is on physical understanding, but engineering aspects are also discussed throughout the text. Each chapter also includes selected problems that can be assigned to students. The book's primary readership is likely to be graduate students, research scientists, and professional engineers working in fields related to lightwave technology. An attempt is made to include as much recent material as possible so that students are exposed to the recent advances in this exciting field. The reference section at the end of each chapter is more extensive than what is common for a typical textbook. The listing of recent research papers should be helpful to researchers using this book as a reference. At the same time, students can benefit from this feature if they are assigned problems requiring reading of the original research papers. This book may be useful in an upper-level graduate course devoted to optical communications. It can also be used in a two-semester course on optoelectronics or lightwave technology. A large number of persons have contributed to this book either directly or indirectly. It is impossible to mention all of them by name. I thank my graduate students and the students who took my course on optical communication systems and helped improve my class notes through their questions and comments. I am grateful to my colleagues at the Institute of Optics for numerous discussions and for providing a cordial and productive atmosphere. I thank, in particular, Renè Essiambre and Qiang Lin for reading several chapters and providing constructive feedback. Last, but not least, I thank my wife Anne and my daughters, Sipra, Caroline, and Claire, for their patience and encouragement. Govind P. Agrawal Rochester, NY |
Chapter 9.4.2 - Timing Jitter
9.4.2 Timing JitterXPM interaction among neighboring channels can induce considerable timing jitter. The situation is somewhat different from the intrachannel case discussed in Section 8.4.2 where all pulses travel with the same speed and thus remain overlapped throughout the fiber. In contrast, pulses belonging to different channels travel at different speeds in a WDM system and walk through each other at a rate that depends on the wavelength difference of the two channels involved. Since XPM can occur only when pulses overlap in the time domain, one must include the walk-off effects in any study of interchannel XPM [86]-[96]. Physically, timing jitter is a consequence of the frequency shifts experienced by pulses in one channel as they overlap with pulses in other neighboring channels. Temporal overlapping of optical pulses in two neighboring channels is referred to as a collision. As a faster-moving pulse belonging to one channel collides with and passes through a pulse in another channel, the XPM-induced chirp shifts the pulse spectrum first toward the red side and then toward the blue side. In a lossless fiber, most collisions are perfectly symmetric, resulting in no net spectral shift, and hence no temporal shift, at the end of the collision. In a loss-managed system with optical amplifiers placed periodically along the link, power variations make collisions between pulses of different channels asymmetric, resulting in a net frequency shift, and hence in a net temporal shift, that depends on the magnitude of channel spacing. Physically speaking, the speed of pulses belonging to a WDM channel depends on its carrier frequency, and any change in this frequency slows down or speeds up their speed, depending on the direction in which frequency changes. A constant temporal shift would be of little consequence if it were the same for all pulses. However, the XPM-induced shift in the pulse position is different for different pulses because it depends on the bit patterns and wavelengths of other channels, and thus manifests as a timing jitter at the receiver end. This timing jitter degrades the eye pattern, especially for closely spaced channels, and leads to an XPM-induced power penalty that depends on channel spacing and the type of fibers used for the WDM link. The power penalty increases for fibers with large GVD and for WDM systems designed with a small channel spacing and can become quite large when channel spacing is reduced to below 100 GHz. Such a restriction on channel spacing translates into a low spectral efficiency. Mathematically, the effects of interchannel collisions on the performance of WDM systems can be best understood by considering the simplest case of two WDM channels separated by Ωch. Using the NLS equation (8.1.2) with
and neglecting the FWM terms, pulses in each channel are found to evolve according to the following two coupled equations:
where δ = β2Ωch measure of the mismatch between the group velocities of the two channels. In writing these equations, the common carrier frequency is chosen to be in the center of the two channels. It is useful to define the collision length Lcoll as the distance over which pulses in different channels remain overlapping during a collision before separating. It is difficult to determine precisely the instant at which a collision begins or ends. One convention uses 2Tsfor the duration of the collision, where Tsis the full width at the half-maximum (FWHM) of each pulse, assuming that a collision begins and ends when two pulses overlap at their half-power points [86]. In another, the duration Tbof bit slot is used for this purpose. In the case of RZ format, the two conventions are related to each other because Ts - Tb/2 for a 50% duty cycle. Since 5 is a measure of the relative speed of two pulses, the collision length can be written as
where B is the bit rate and Δvch is the channel spacing. As an example, if we use B = 10 Gb/s and β2 = 5 ps2/km, Lcoll ≈ 32 km for a channel spacing of 100 GHz and it reduces to below 8 km for a 40-Gb/s system. Even smaller values can occur if standard fibers are used with β2 ≈ 20 ps2/km. In contrast, Lcoll can exceed 100 km when low-dispersion fibers are employed with a small channel spacing. The last term in Eqs. (9.4.3) and (9.4.4) is due to XPM-induced coupling between two channels and is responsible for the temporal and frequency shifts during a collision. Similar to the analysis used in Section 8.4.2 for intrachannel XPM, we can employ the variational or the moment method to calculate these shifts [95]. In fact, details are similar to the intrachannel case, and the moment equations for the pulse parameters are almost identical to Eqs. (8.4.11) through (8.4.14). The only difference is that one needs to take into account the group-velocity mismatch between the two pulses. If we assume that pulses in two channel are identical in all respects, these equations take the form (after dropping the subscript on T and C)
where µ = Δt/T. Notice that the temporal shift depends on the net frequency separation Ωch + ΔΩ between the two channels, where Ωch is the constant channel spacing and ΔΩis the XPM-induced frequency shift. Similarly, Δt represents net temporal spacing between two pulses and consists of two parts Δtpand ΔtXPM. The first part represents the collision of two pulses because of a finite value of Ωch, while the second part is due to XPM-induced coupling between them. The net XPM-induced frequency shift ΔΩ can be calculated by integrating Eq. (9.4.8) over a distance longer than the collision length such that pulses are well separated before and after the collision. Using z = zc + µT/δ where zcis the location where pulses overlap completely (center of collision), the result can be written as
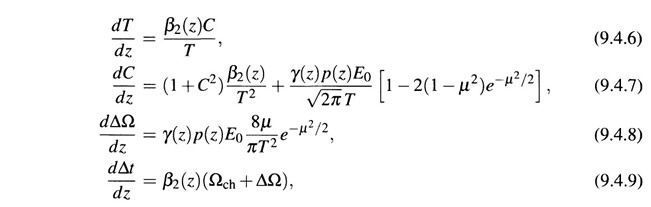
where we assumed that pulse width does not change significantly during a collision. The parameter µ ≈ Δtp / 2T changes from negative to positive, becoming zero in the center of the collision where pulses overlap fully. Since the integrand is an odd function of µ when γ and p are z-independent, the integral in Eq. (9.4.10) vanishes in this case. This can happen if (1) a collision is complete entirely within one fiber section with constant γ and (2) distributed amplification is used such that p ≈ 1. Under such conditions, two colliding pulses do not experience any temporal shift within their assigned bit slots. Figure 9.15(a) shows how the frequency of the slow-moving pulse changes during the collision of two 50-ps solitons when channel spacing is 75 GHz. The frequency shifts up first as two pulses approach each other, reaches a peak value of about 0.6 GHz at the point of maximum overlap, and then decreases back to zero as two pulses separate. The maximum frequency shift depends on the channel spacing. It can be calculated by replacing the upper limit in Eq. (9.4.10) with 0. When p = 1 and γ is constant during a collision, it is given by
where LNL = (γP0) -1 is the nonlinear length and Δvch is the channel spacing. One can follow the same procedure for the collision of two solitons with an amplitude of the form sech(t/T0) to find Δfmax = (3π2T20Δvch)-1. For 40-Gb/s channels spaced 100 GHz apart, this maximum frequency shift can exceed 10 GHz. Most interchannel collisions are rarely symmetric in WDM systems for a variety of reasons. When fiber losses are compensated periodically through lumped amplifiers, p(z) is never an even function with respect to the center of collision. Physically, large peak-power variations occurring over a collision length destroy the symmetric nature of the collision. As a result, pulses suffer net frequency and temporal shifts after the collision is over. Equation (9.4.9) can be used to calculate the residual frequency shift for a given functional form of p(z). Figure 9.15(b) shows the residual shift as a function of the ratio Lcoll/LA where LA is the amplifier spacing, in the case of solitons [86]. The residual frequency shift increases rapidly as Lcoll approaches LAand becomes ~0.1 GHz. Such shifts are not acceptable in practice since they accumulate over multiple collisions and produce velocity changes large enough to move the pulse out of its assigned bit slot. When Lcoll is so large that a collision lasts over several amplifier spacings, the effects of gain-loss variations begin to average out, and the residual frequency shift decreases. As seen in Figure 9.15(b), it virtually vanishes for Lcoll > 2LA(safe region).
Figure 9.15: (a) Frequency shift during collision of two 50-ps solitons with 75-GHz channel spacing, (b) Residual frequency shift after a collision because of lumped amplifiers (LA = 20 and 40 km for lower and upper curves, respectively). Numerical results are shown by solid dots. (After Ref. [86]; ©1991 IEEE.)
An entirely different situation is encountered in dispersion-managed systems where a collision may not be complete before the dispersion changes suddenly its nature at the end of a fiber section. As soon as the colliding pulses enter the fiber section with opposite dispersion characteristics, the pulse traveling faster begins to travel slower, and vice versa. Moreover, because of high values of local dispersion, the speed difference between two channels is relatively large. Also, the pulse width changes in each map period and can become quite large in some regions. The net result is that two colliding pulses move in a zigzag fashion and pass through each other many times before they separate from each other because of the much slower relative motion governed by the average value of GVD. Since the effective collision length becomes much larger than the map period (and the amplifier spacing), the condition Lcoll > 2LAis satisfied even when soliton wavelengths differ by 20 nm or more. This feature makes it possible to design WDM systems with a large number of channels. The residual frequency shifts encountered in dispersion-managed systems depend on a large number of parameters, including map period, map strength, and amplifier spacing [90]-[96]. As before, residual frequency shifts occurring during complete collisions average out to zero. However, not all collisions are complete. For example, if pulses overlap initially, the incomplete nature of the collision will produce some residual frequency shift. The zigzag motion of pulses can also produce frequency shifts if two pulses approach each other near the junction of opposite-dispersion fibers because they will reverse direction before crossing each other. Such partial collisions can result in large frequency shifts and thus produce a relatively large timing jitter. This situation can be avoided by optimizing the dispersion map used for a WDM system appropriately [95].
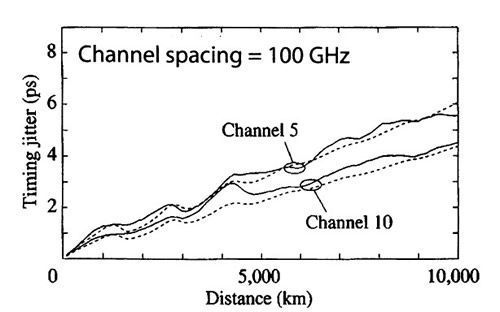
Figure 9.16: Growth of timing jitter in two channels as a function of distance for a 10-channel WDM system designed with a 100-km periodic dispersion map. Numerical (solid curves) and semianalytic (dashed curves) results are compared for 10-Gb/s channels spaced apart by 100 GHz. (After Ref. [96]; ©2000 IEEE.)
A noteworthy feature of Figure 9.16 is that timing jitter does not increase monoton-ically and exhibits periodic humps. The hump period is related to the distance over which pulses in two neighboring channels separate fully, after following a zigzag path, and is given by Lh= Tb / ( |