Charles Smith, Fidelis O. Eke
The analysis of a mechanical system having elements under acceleration must consider these accelerations along with the related forces. In such analysis, the force side of Newton's second law, f = m a, and the third law of action and reaction, are dealt with in exactly the same manner as in Statics. But it is the relationships among positions, velocities, and accelerations that complete the discipline of dynamic analysis. The following two sections review these relationships, and the remainder of the chapter deals with their incorporation in Newton's laws of motion.
KINEMATICS OF A PARTICLE
Consider a point P that moves along a smooth path as indicated in Fig. 8-1. The position of the point may be specified by the vector r( t), defined to be from an arbitrarily-selected, fixed point 0 to the moving point P. The velocity v of the point is defined to be the derivative with respect to t of r( t), written as
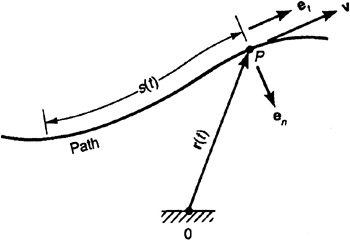 Figure 8-1
Figure 8-1 Although this definition is sometimes used for evaluation [that is, by differentiating a specific expression for r( t)], it will often be more direct to use other relationships. It follows from the above definition that the velocity vector is tangent to the path of the particle; thus, upon introduction of a unit vector e t, defined to be tangent to the path, the velocity can also be expressed as
The position...
Copyright Dearborn Financial Publishing, Inc. 2004 under license agreement with Books24x7