Programmed Review for Electrical Engineering, Third Edition

This text contains an organized review of the basic electrical engineering fundamentals, with 111 problems, solutions and explanations for the core electrical engineering concepts.
Discussions of and problems related to singularity functions, second-order systems, poles and zeros, partial fractions, Laplace transforms, stability, transfer function, compensation, Bode analysis, and root locus.
The field of control theory brings together a broad spectrum of engineering principles and specialized mathematical and graphical techniques. This chapter presents the minimal technical background needed to demonstrate the solutions to the types of problems often found in the PE Exam. The solutions require a knowledge of basic feedback system terms, block diagram algebra, singularity functions, second order systems, differential equations, convolution, translation, inversion, Laplace transforms, pole-zero maps, RLC circuit analysis, partial fractions, stability, errors, system type, transfer functions, compensation, Bode analysis, root locus analysis, and system analysis and design.
If you have sufficient background in these areas, you will recognize the problem-solving techniques. If you do not have sufficient background, you may wish to study a basic college text before working through this chapter.
A simple basic feedback system is illustrated as follows:
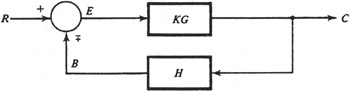
In the equations below, a minus sign denotes positive feedback; a plus sign denotes negative feedback.
| K | = | constant forward loop gain |
| G | = | frequency-sensitive forward loop gain |
| E | = | error signal = R - B |
| R | = | reference or command input |
| B | = | CH = primary feedback signal |
| C | = | controlled variable output |
| H | = | feedback gain ( H = 1 for unity feedback) |
| KG | = | forward loop transfer function = forward gain |
| KGH | = | open loop transfer... |







