Introduction to Modern Navigation Systems

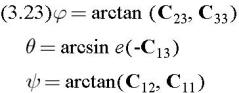
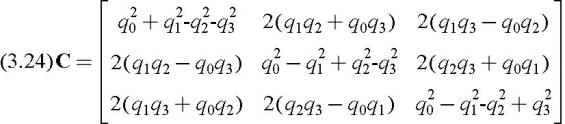
Demystifying the central theme of the frame rotation using such algorithms as the quaternions, this book introduces the computational issues, discusses the physical aspects tied to implementing these equations and explains alignment techniques.