Overview
Quaternions, called hyper complex numbers, are generalization of complex numbers, and were originally conceived by R.W. Hamilton in 1843 [1]. A complex number is given by
where a and b are both real numbers and i is the imaginary number which is given by
As evident, a complex number is the sum of two elements one real and one imaginary. Complex numbers may be thought of as vectors in a two dimensional space with two element basis { e 0 , e 1}, where e 0=1 and e 1= i. As such, c in Eq. (B.1) can be represented by
A quaternion, made of four elements, is a generalization of a complex number. Similar to a complex vectors, they can be represented in a four dimensional space using four element basis { e 0, e 1, e 2, e 3} defined by
Hamilton s original description of this basis was given by [2]
From which we could deduce that
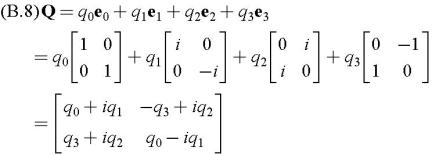
With the basis{ e 0, e 1, e 2, e 3} a quaternion Q is represented by
where ( q 0, q 1, q 2, q 3) are scalars. When we substitute for the elements of the basis from Eq. (B.4) in the above equation, the quaternion becomes
Even though Eq. (B.8) is the formal representation of a quaternion, we could present it as a four dimensional vector for computational purposes. For derivation...