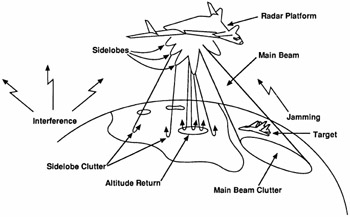
Airborne Early Radar Warning System Concepts

Intended to serve as a general reference for those working in the broad range of professional disciplines involved in AEW-related activities, this text addresses AEW systems, their capabilities and limitations, and areas in which they can be improved.