Process Control: A First Course with MATLAB

Written from the perspective of a student, this text emphasizes the importance of computers in the modern age of teaching and practicing process control.
We now finally launch into the material on controllers. State-space representation is more abstract, and it helps to understand controllers in the classical sense first. We will come back to state-space controller design later. The introduction stays with the basics. Our primary focus is to learn how to design and tune a classical proportional-integra-derivative (PID) controller. Before that, we first need to know how to set up a problem and derive the closed-loop characteristic equation.
Introducing the basic PID control schemes
Deriving the closed-loop transfer function of a system and understanding its properties
We use a simple liquid-level controller to illustrate the concept of a classic feedback control system. [1] In this example (Fig. 5.1), we monitor the liquid level in a vessel and use the information to adjust the opening of an effluent valve to keep the liquid level at some user-specified value (the set point or reference). In this case, the liquid level is both the measured variable and the controlled variable - they are the same in a SISO system. In this respect, the controlled variable is also the output variable of the SISO system. A system refers to the process that we need to control plus the controller and accompanying accessories, such as sensors and actuators. [2]
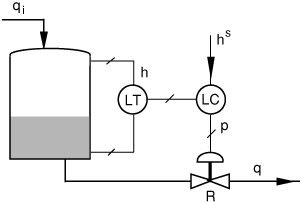
Let's say we want to keep the liquid level at the set point h