8.5 Air Defense Radar, Cartesian Coordinate System
In this section we design a Kalman filter for a short-range air defense radar. The radar tracks a hostile fighter-bomber on a ground attack mission. The trajectory is a typical "turn-dive-and-turn-climb" maneuver (Figure 8.17). The tracking radar is located at the origin of the Cartesian coordinate system.
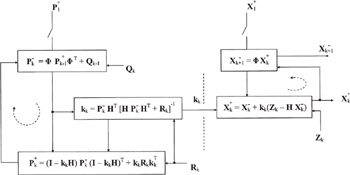 Figure 8.16: Flow diagram of Kalman recursive filter
Figure 8.16: Flow diagram of Kalman recursive filter 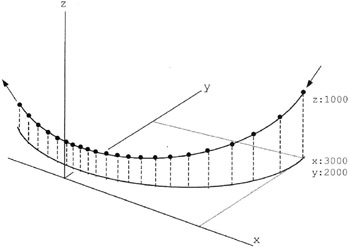 Figure 8.17: Target trajectory, turn-dive-and-turn-climb
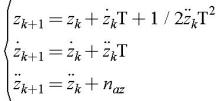
Figure 8.17: Target trajectory, turn-dive-and-turn-climb We write the state equation (aircraft position and motion) in CCS coordinates (x,y,z) as follows.
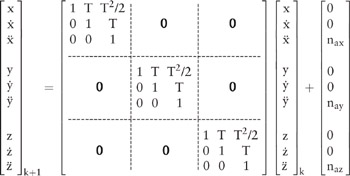
The above three simultaneous linear equations can be written in a vector-matrix form where n ax, n ay, and n az are the random acceleration noise in x, y, and z axes.
A more compact form is
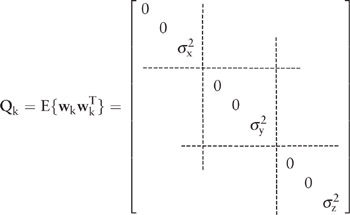
The random acceleration noise covariance matrix Q k is given by
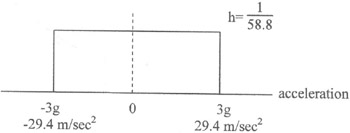
The random acceleration noise is assumed equal for three axes: n ax = n ay = n az, uncorrelated and uniformly distributed over 3.0 g.
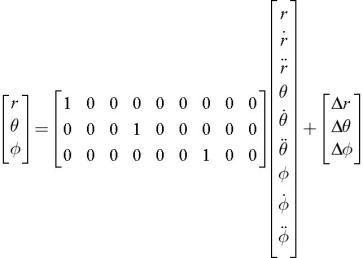
The variance  . The measurement equation in LOS coordinates system is
. The measurement equation in LOS coordinates system is
The measurement equation in a compact matrix form is
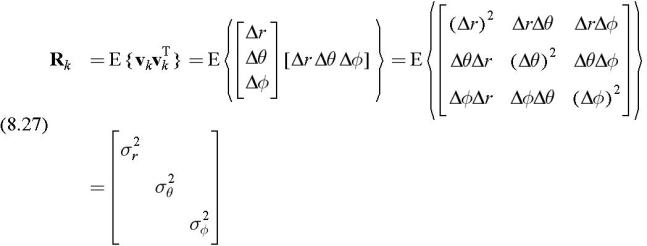
The measurement error covariance matrix R k in LOS is given by
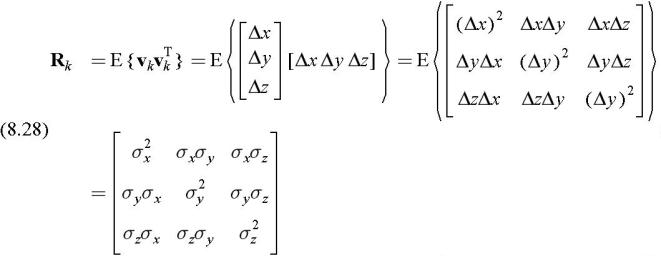
On the other hand, the error covariance matrix R k in CCS is given by
Since the state equation is written in CCS coordinates and the measurement equation in LOS coordinates, we need a conversion formula between the two coordinates.
Figure 8.18 helps us to formulate the conversion between the Cartesian coordinates and...