8.7 Kalman Filter without Matrix Inversion
For Kalman filter processing where matrix inversion is always required the roundoff error can be a problem with small word-length machines. A class of Kalman filter processing with "square-root" algorithms [8, 9] has been developed for a better numerical behavior; however, it has not completely eliminated the problems.
Bierman [10] was the first to report a filter processing without matrix inversion through UDU T factorization for numerical stability. We study his inversionless algorithm in this section. We follow his development and appreciate the superiority of his approach.
Estimated or predicted error covariance matrix can be factorized (decomposed) as follows, provided that the matrix is symmetrical and positive definite. We shall use an overhead caret (^) and an overhead tilde (~) for the estimated and predicted error covariance matrices respectively.
For example,
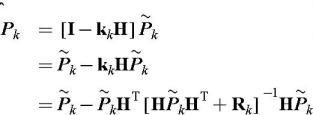
The UDU T factorization is programmed in Chapter 1. From previous analysis the estimated error covariance matrix update is given by
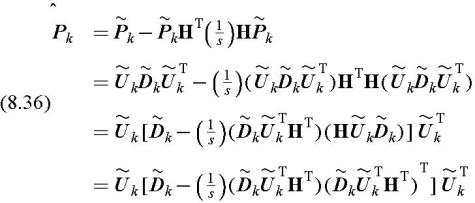
If the bracketed term, without inversion, is a scalar, (we shall show this shortly) the above expression can be written as
Since  is symmetric and positive-definitethe bracketed term is symmetric and positive-definite. Therefore we can apply UDU T factorization to the bracketed term.
is symmetric and positive-definitethe bracketed term is symmetric and positive-definite. Therefore we can apply UDU T factorization to the bracketed term.
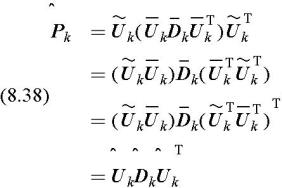
Then, the estimated error covariance matrix  will be expressed as
will be expressed as
where we use  for shorthand notation.
for shorthand notation.
We have proved that the estimated error covariance matrix  can be factorized as
can be factorized as  .
.
Next we prove that the Kalman gain matrix k k can...