Fundamentals of Kalman Filtering: A Practical Approach, Second Edition

Containing numerous real-life problems and examples presented in detail, this text demonstrates the many ways in which Kalman filters can be designed.
In all of the applications so far, there was only one sensor measurement from which we built our Kalman filters. In this chapter we will attempt to track a cannon-launched projectile with a sensor that measures both the range and angle to the projectile. We will first see how the extra sensor measurement is incorporated into an extended Kalman filter. In this example the real world is linear in the Cartesian coordinate system, but the measurements are nonlinear. The extended Kalman filter will initially be designed in the Cartesian coordinate system to establish a benchmark for tracking performance. We will then see if performance can be improved by redesigning the filter in the polar coordinate system, where the measurements are linear but the model of the real world is nonlinear. Finally, we will also see if linear coupled and decoupled polynomial Kalman filters also can be made to work for this problem.
Consider another simple example in which a radar tracks a cannon-launched projectile traveling in a two-dimensional, drag-free environment, as shown in Fig. 9.1. After the projectile is launched at an initial velocity, only gravity acts on the projectile. The tracking radar, which is located at coordinates x R, y R of Fig. 9.1, measures the range r and angle ? from the radar to the projectile.
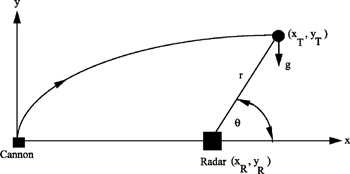
In this example the projectile is launched at an initial velocity of 3000 ft/s at a 45-deg angle with...