Fundamentals of Kalman Filtering: A Practical Approach, Second Edition

Containing numerous real-life problems and examples presented in detail, this text demonstrates the many ways in which Kalman filters can be designed.
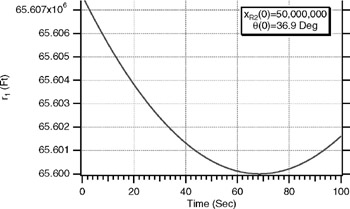
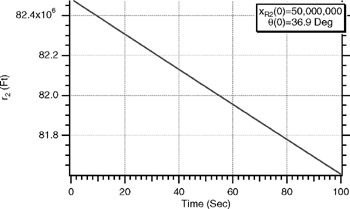
It seems reasonable to ask if filtering could have further reduced the receiver location errors. The simplest possible approach would be to filter the noisy range measurements before they are used to calculate the receiver location. Before we can determine the type and order of the filter to use, we must see how the range from each of the satellites to the receiver varies with time. For the geometry in which the initial angle between the two range vectors is 36.9 deg [i.e., x R2(0) = 50,000,000], the ranges from each of the satellites to the receiver is displayed in Figs. 11.8 and 11.9. For 100 s of satellite flight, we can see that the range from the first satellite to the receiver is a parabolic function of time, while the range from the second satellite to the receiver is a linear function of time. Therefore, to play it safe, a second-order filter is required to prevent truncation error or filter divergence. For simplicity we will consider using a linear second-order recursive least-squares filter. If the flight times were longer, we might have to use a second-order linear polynomial Kalman filter with process noise.
We will now proceed to develop the second-order recursive least-squares filter equations for this application. Recall in Chapter 3 that we showed that the gains of a second-order...







