Fundamentals of Kalman Filtering: A Practical Approach, Second Edition

Containing numerous real-life problems and examples presented in detail, this text demonstrates the many ways in which Kalman filters can be designed.
Consider two satellites traveling in orbit in a two-dimensional world. If we are considering a flat Earth, then the satellites will appear as if they are each traveling at constant altitude. Let us assume that at anytime the two satellite locations [( x R1, y R1) and ( x R2, y R2)] are known perfectly. In addition, let us first consider the case where each satellite is able to take perfect range measurements r 1 and r 2 to a receiver at location ( x, y), as shown in Fig. 11.1. It seems reasonable to believe that two range measurements are sufficient for determining the location of the receiver.
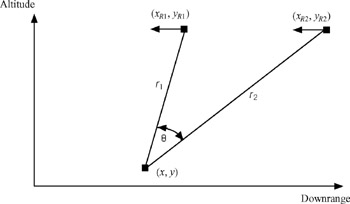
To calculate the location of the receiver numerically, let us first recall that the range from each of the satellites to the receiver can be written by inspection of Fig. 11.1 as
The preceding two equations have two unknowns (i.e., x and y are unknowns); because we are assuming that we know the location of both satellites perfectly (i.e., x R1, y R1, x R2, and y R2 are known), we have enough information to solve for the location of the receiver. Squaring and multiplying out each of the terms of the two preceding equations yields
By subtracting the second equation from the first...







