Fundamentals of Kalman Filtering: A Practical Approach, Second Edition

Containing numerous real-life problems and examples presented in detail, this text demonstrates the many ways in which Kalman filters can be designed.
In the previous chapter we saw how a receiver could be located based on extended Kalman filtering of range measurements to the receiver from either one or two satellites. In those examples of Chapter 11, it was assumed that the satellite location was known perfectly and that the range measurements were only corrupted by zero-mean Gaussian noise. In this chapter we will first see that estimation accuracy is degraded as a result of a possible bias in the range measurement. Two cases will be considered. First, the range biases will be assumed to be caused solely by the satellites themselves. In this case each range measurement from the satellite is assumed to have a bias. Second, the range bias will be assumed to be caused solely by the receiver (i.e., because of a timing error). Various methods for improving performance by estimating the bias will be explored.
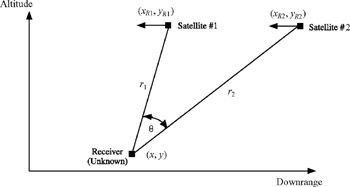
In the preceding chapter, one of the extended Kalman filters that was developed used range measurements from two satellites to a stationary receiver. In that formulation, which is based on Fig. 12.1, it was assumed that the satellite locations were known perfectly and that the range measurements were only corrupted by zero-mean uncorrelated Gaussian noise.
Listing 12.1 presents the same extended Kalman filter of Chapter 11 in the environment of Fig. 12.1. However, this time the noisy range measurements also have a 10,000-ft bias on them. Highlighted in bold in Listing 12.1...