9.4 Daubechies Four-Coefficient Wavelet
Let's also consider the case of four coefficients in a conjugate quadrature filter. Figure 9.6 shows a structure similar to Figure 9.5, except that its FIR filters have four taps (use four coefficients).
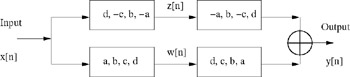 Figure 9.6: A two-channel filter bank with four coefficients.
Figure 9.6: A two-channel filter bank with four coefficients. The expressions for w[ n] and z[ n] can be found in a similar manner as in section 9.1:
We will also need w[ n ? 1], w[ n ? 2], and so forth, so it is helpful to define these for an integer k:
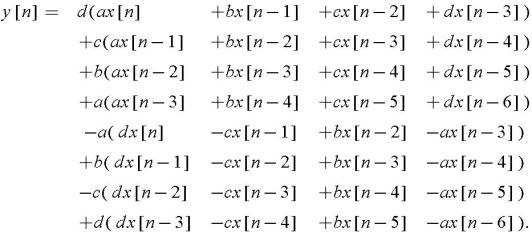
Now we can put this all together, and express y[ n] in terms of x[ n] only:
Multiplying through:
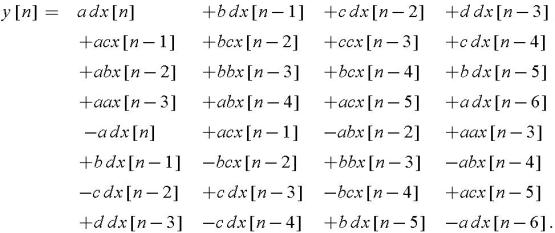
Now we rewrite this equation to line up the x[ n ? k] values properly:
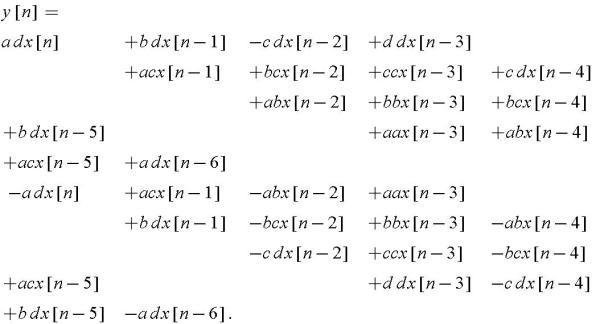
Repeating the above equation, only eliminating the parts that cancel:
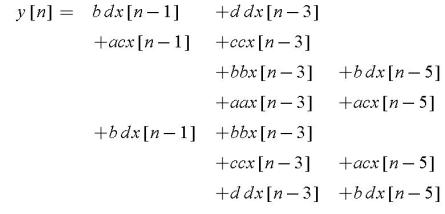
The terms x[ n ? 1] and x[ n ? 5] are pesky, since we want each output of y[ n] to depend upon only one input of x[ n]. But if ac happens to equal ? bd, then these terms will cancel each other out. Therefore, we will make this a requirement. If ac+ bd = 0, then the x[ n ?1] and x[ n ?5] terms are eliminated, and we are left with:
or that y[ n] is a delayed version...