 | This up-to-date text/reference is designed to present the fundamental principles of robotics with a strong emphasis on engineering applications and industrial solutions based on robotic technology. It can be used by practicing engineers and scientists - or as a text in standard university courses in robotics. The book has extensive coverage of the major robotic classifications, including Wheeled Mobile Robots, Legged Robots, and the Robotic Manipulator. A central theme is the importance of kinematics to robotic principles. The book is accompanied by a CD-ROM with MATLAB simulations, photographs, tutorials, and third-party software (see About the CD-ROM section). |
Robotics
Chapter 5 Kinematics of Robotic Manipulators
In This Chapter
- Introduction to Robotic Manipulators
- Position and Orientation of Objects in Space
- Forward Kinematics
- Inverse Kinematics
5.1 INTRODUCTION TO ROBOTIC MANIPULATORS
 | Most robotic manipulators are strong rigid devices with powerful motors, strong gearing systems, and very accurate models of the dynamic response. For undemanding tasks it is possible to precompute and apply the forces needed to obtain a given velocity. This control is called computed torque control. Alternatively, a high-gain feedback on joint angle control leads to an adequate tracking performance. The important control problem is one of understanding and controlling the manipulator kinematics. Very few robots are regularly pushed to the limit where the dynamic model becomes important since this will lead to greatly reduce operational life and high maintenance costs. In this chapter we consider that part of the manipulator kinematics known as forward kinematics. |
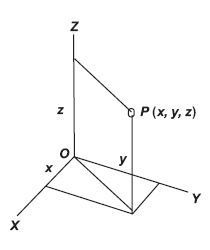
FIGURE 5.1 Position of a point P in a Cartesian coordinate frame.
© 2006-2026 Infinity Science Press. All rights reserved.







