 | This up-to-date text/reference is designed to present the fundamental principles of robotics with a strong emphasis on engineering applications and industrial solutions based on robotic technology. It can be used by practicing engineers and scientists - or as a text in standard university courses in robotics. The book has extensive coverage of the major robotic classifications, including Wheeled Mobile Robots, Legged Robots, and the Robotic Manipulator. A central theme is the importance of kinematics to robotic principles. The book is accompanied by a CD-ROM with MATLAB simulations, photographs, tutorials, and third-party software (see About the CD-ROM section). |
Robotics
Chapter 6 Classification of Sensors
In This Chapter
- Introduction to Robotic Manipulators
- Classifi cation of Sensors
- Encoders and Dead Reckoning
- Infrared Sensors
- Ground-based RF Systems
- Active Beacons
- Ultrasonic Transponder Trilateration
- Accelerometers
- Gyroscopes
- Laser Range Finder
- Vision-based Sensors
- Color-tracking Sensors
- Sensor Mounting Arrangement
- Design of the Circuitry
- Reading the Pulses in a Computer
6.1 CLASSIFICATION OF SENSORS
There are a wide variety of sensors used in mobile robots (Figure 6.1). Some sensors are used to measure simple values like the internal temperature of a robot s electronics or the rotational speed of the motors. Other, more sophisticated sensors can be used to acquire information about the robot s environment or even to directly measure a robot s global position. We classify sensors using two important functional axes:
- proprioceptive/exteroceptive and
- passive/active.
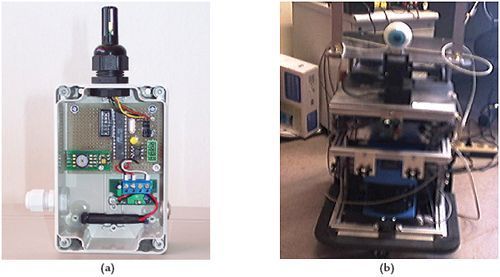
FIGURE 6.1 Examples of robots with multisensor systems.
(a) Helpmate from Transition Research
Corporation;
(b) BIBA Robot, BlueBotics SA.
Proprioceptive sensors measure values internal to the system (robot); for example, motor speed, wheel load, robot arm joint angles, and battery voltage.
Exteroceptive sensors acquire information from the robot s environment; for example, distance measurements, light intensity, and sound amplitude. Hence, exteroceptive sensor measurements are interpreted by the robot in order to extract meaningful environmental features.
Passive sensors measure ambient environment energy entering the sensor. Examples of passive sensors include temperature probes, microphones, and CCD or CMOS cameras.
Active sensors emit energy into the environment, and then measure the environmental reaction. Because active sensors can manage more controlled interactions with the environment, they often achieve superior performance. However, active sensing includes several risks: the outbound energy may affect the very characteristics that the sensor is attempting to measure. Furthermore, an active sensor may suffer from interference between its signal and those beyond its control. For example, signals emitted by other nearby robots, or similar sensors on the same robot may influence the resulting measurements. Examples of active sensors include wheel quadrature encoders, ultrasonic sensors, and laser range finders.The table below gives a classification of the most useful sensors for mobile robot applications.
| TABLE 6.1 Classification of Sensors Used in Mobile Robotics Applications | |||
|---|---|---|---|
| General Classification (typical use) | Sensor (Sensor System) | PC or EC | A or P |
| Tactile Sensors (detection of physical contact or close- ness; security switches) Wheel/motor sen- sors (wheel/motor speed and position) Heading sensors (orientation of the robot in relation to a fixed reference frame) Ground-based beacons (localization in a fixed reference frame) Active ranging (reflectivity, time-of- flight, and geometric triangulation) Laser rangefinder Motion/speed sensors (speed relative to fixed or moving objects) Vision-based sensors (visual ranging, whole-image analysis, segmentation, object recognition) | Contact switches, Bumpers, Optical barriers, Noncontact proximity sensors Brush encoders Potentiometers Synchroes, Resolvers Optical encoders Magnetic encoders Inductive encoders Capacitive encoders Compass Gyroscope Inclinometers GPS Active optical or RF beacons Active ultrasonic beacons Reflective beacons Reflective sensors Ultrasonic sensors EC Optical triangulation (1D) Structured light (2D) Doppler radar CCD/CMOS camera(s) Visual ranging packages Object tracking packages | EC EC EC PC PC PC PC PC PC PC EC PC EC EC EC EC EC EC EC A EC EC EC EC EC | P A A P P A A A A A P P A/P A A A A A A A AAAAA A A A A |
Where:
A: Active
P: Passive
A/P: Active/Passive
PC: Proprioceptive
EC: Exteroceptive
The sensor classes in Table 6.1 are arranged in ascending order of complexity and descending order of technological maturity. Tactile sensors and prospective sensors are critical to virtually all mobile robots, and are well understood and easily implemented. Commercial quadrature encoders, for example, may be purchased as part of a gear-motor assembly used in a mobile robot. At the other extreme, visual interpretation by means of one or more CCD/CMOS cameras provides a broad array of potential functionalities, from obstacle avoidance and localization to human face recognition. However, commercially available sensor units that provide visual functionalities are only now beginning to emerge.
© 2006-2026 Infinity Science Press. All rights reserved.







