Gear Geometry and Applied Theory, Second Edtion

An invaluable reference for designers, theoreticians, students, and manufacturers, this text covers the theory, design, geometry, and manufacture of all types of gears and gear drives.
Consider that two bodies, 1 and 2, perform planar motions with respect to a fixed reference frame, f. We consider three cases:
Both bodies perform rotational motion in opposite direction about parallel axes O 1 and O 2 with instantaneous angular velocities ? (1) and ? (2) (Fig. 3.1.1).
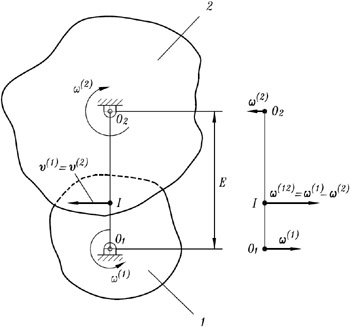
Figure 3.1.1: Rotation between parallel axes in opposite direction.
Both bodies perform rotational motions in the same direction with angular velocities ? (1) and ? (2) (Fig. 3.1.2).
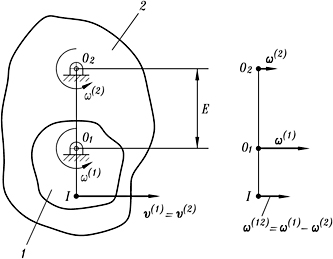
Figure 3.1.2: Rotation between parallel axes in the same direction.
One of the bodies, say 1, performs rotational motion with angular velocity ?, and the other body performs translational motion in the plane of motion with linear velocity v (Fig. 3.1.3).
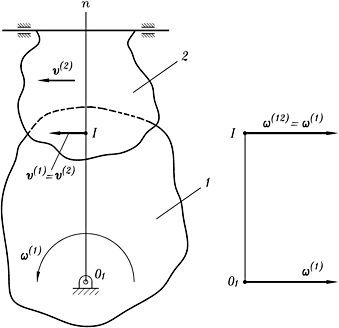
Figure 3.1.3: Transformation of rotation into translation.
The instantaneous center of rotation, designated I, is the point in the fixed coordinate system where the relative velocity v (12) is equal to zero, that is,
Vector equation
can be observed only at such a point I that lies on the shortest distance O 1 O 2 and satisfies the equation
The location I on the center distance O 1 O 2 provides the same direction for vectors v (1) and v (2). Equation (3.1.3) provides that vectors v (1) and v (2) not only are of the same direction but also have the...