Gear Geometry and Applied Theory, Second Edtion

An invaluable reference for designers, theoreticians, students, and manufacturers, this text covers the theory, design, geometry, and manufacture of all types of gears and gear drives.
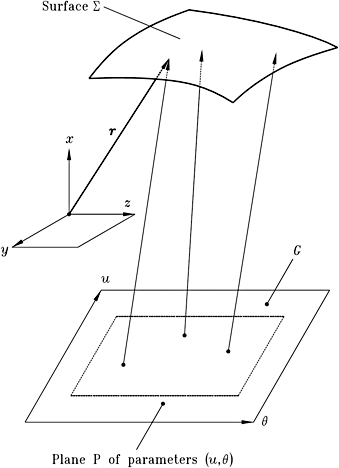
Parametric representation of a surface means that the position vector of a current surface point is associated with two variable parameters u and ? and is represented by the following vector equation:
Here, i, j, and k are the unit vectors of the coordinate axes; functions
determine the Cartesian coordinates of the surface points if u and ? are given.
We may imagine a rectangle G in the plane of parameters ( u, ?) (Fig. 5.1.1). Vector equation (5.1.1) sets the correspondence between the given point of the rectangle G and the single point r( u, ?) of the surface. Generally, one-to-one correspondence is not guaranteed; it may happen that the given surface point r( u, ?) corresponds to more than one point of the rectangle G. A surface with one-to-one correspondence between the set of parameters ( u, ?) and the position vector r( u, ?) is called a simple surface. Such a surface does not have points of self-intersection.
Parameters ( u, ?) are called curvilinear coordinates (Gaussian coordinates) on the surface. Consider that one of the curvilinear coordinates is fixed, for instance ? = ? 0, and the other one ( u) is varied. Then, equation
represents a line on the surface that is called the u line. Similarly,...







