Gear Geometry and Applied Theory, Second Edtion

An invaluable reference for designers, theoreticians, students, and manufacturers, this text covers the theory, design, geometry, and manufacture of all types of gears and gear drives.
Consider that the cross section of the worm is represented in parametric form in the auxiliary coordinate system S a as [Fig. 19.10.1(a)]
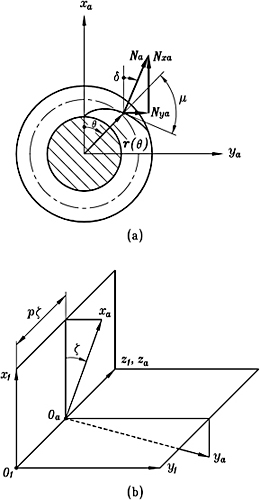
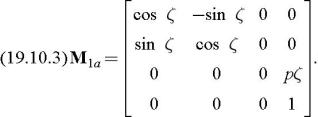
where r( ?) is the polar equation of the cross section. The worm surface now can be represented as the surface that is generated by the curve r a( ?) that is performing the screw motion about the worm z 1 axis [Fig. 19.10.1(b)]. The worm surface can be determined by the matrix equation
where [Fig. 19.10.1(b)]
Using Eqs. (19.10.1) to (19.10.3), we represent the worm surface as follows:
For the following derivations we need angle ? that is formed between the position vector r a( ?) and the tangent to this curve [Fig. 19.10.1(a)]. It is known that
An alternative equation for determination of ? is based on the expression [Fig. 19.10.1(a)]
where N a is the normal to the planar curve r a( ?).
The unit normal to surface (19.10.4) is determined with the equations
which yield

We recall that because the worm surface is a helicoid, the coordinates of the worm surface and the surface unit normal are related by the following equation (see Section 5.5):
The screw parameter p is positive for a right-hand worm.
The advantage of Eqs. (19.10.4) and (19.10.8) is that the worm surface and its normal are represented in two-parameter form. However, this approach...







