In parallel with developments in adaptive nonlinear control, there has been a tremendous amount of activity in neural control and adaptive fuzzy approaches. In these studies, neural networks or fuzzy approximators are used to approximate unknown nonlinearities. The input/output response of the approximator is modified by adjusting the values of certain parameters, usually referred to as weights. From a mathematical control perspective, neural networks and fuzzy approximators represent just two classes of function approximators. Polynomials, splines, radial basis functions, and wavelets are examples of other function approximators that can be used and have been used in a similar setting. We refer to such approximation models with adaptivity features as adaptive approximators, and control methodologies that are based on them as adaptive approximation based control. Adaptive approximation based control encompasses a variety of methods that appear in the literature: intelligent control, neural control, adaptive fuzzy control, memory-based control, knowledge-based control, adaptive nonlinear control, and adaptive linear control. |
 During the last few years there have been significant developments in the control of highly uncertain, nonlinear dynamical systems. For systems with parametric uncertainty, adaptive nonlinear control has evolved as a powerful methodology leading to global stability and tracking results for a class of nonlinear systems. Advances in geometric nonlinear control theory, in conjunction with the development and refinement of new techniques, such as the backstepping procedure and tuning functions, have brought about the design of control systems with proven stability properties. In addition, there has been a lot of research activity on robust nonlinear control design methods, such as sliding mode control, Lyapunov redesign method, nonlinear damping, and adaptive bounding control. These techniques are based on the assumption that the uncertainty in the nonlinear functions is within some known, or partially known, bounding functions.
During the last few years there have been significant developments in the control of highly uncertain, nonlinear dynamical systems. For systems with parametric uncertainty, adaptive nonlinear control has evolved as a powerful methodology leading to global stability and tracking results for a class of nonlinear systems. Advances in geometric nonlinear control theory, in conjunction with the development and refinement of new techniques, such as the backstepping procedure and tuning functions, have brought about the design of control systems with proven stability properties. In addition, there has been a lot of research activity on robust nonlinear control design methods, such as sliding mode control, Lyapunov redesign method, nonlinear damping, and adaptive bounding control. These techniques are based on the assumption that the uncertainty in the nonlinear functions is within some known, or partially known, bounding functions.Chapter 5.1.3 - Gain Scheduling
In the previous two subsections we have described the procedure for linearizing around an operating point xeor around a trajectory x*(t). As discussed, a key limitation of the small-signal linearization approach is the fact that the linear model is accurate only in a neighborhood around the operating point xeor the nominal trajectory x*. Consequently, the linear control law that is designed based on the linear model is, in general, effective only if the system state remains in that same neighborhood. In this subsection we introduce the gain scheduling control approach, which is based on small-signal linearization around multiple operating points. For each linear model we design a feedback controller, thus creating a family of feedback control laws, each applicable in the neighborhood of a specific operating point. The family of feedback controllers can be combined into a single control whose parameters are changed by a scheduling scheme based on the trajectory or some other scheduling variables. 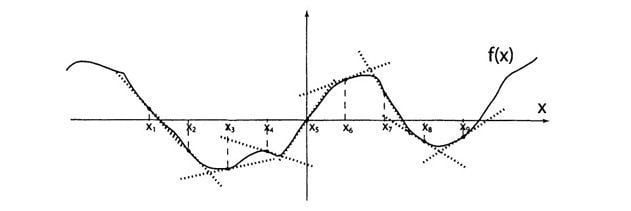
Consider again the nonlinear system (5.1), where in this case we linearize the system into N linear models  where z = x – x1 for each i. Each linear model parameterized by (Ai, Bi) is valid around an operating point point x1. This is illustrated in Figure 5.3, where the nonlinear function ƒ(x) is linearized around nine operating points {x1, x2 ... x9}. For each linear model we design a control law based on the control objective associated with a particular operation point. Suppose that the control law u = Kiz corresponds to the linear model Intuitively, we note that if the region of attraction associated with each linearization is larger than the scheduled operating region corresponding to each operating point, then the resulting gain scheduling control scheme will be stable. However, special care needs to be taken since the resulting controller is time-varying, hence the stability analysis needs to be treated as a time-varying system. A formal stability analysis for gain scheduling is beyond the scope of this text (see the work of Shamma and Athans [242, 243]). Despite the derivation of some stability results under certain conditions, gain scheduling is still considered to some degree an ad hoc control method. However, it has been used in several application examples, especially in flight control [118, 161, 183, 256, 257, 258]. The gain scheduling approach has also been utilized in other applications such as in process control and automotive applications [11, 113, 126]. One of the key limitations of gain scheduling is that the controller parameters are pre-computed offline for each operating condition. Hence, during operation the controller is fixed, even though the linear control gains are changing as the operating conditions change. In the presence of modeling errors or changes in the system dynamics, the gain scheduling controller may result in deterioration of the performance since the method does not provide any learning capability to correct – during operation – any inaccurate schedules. Another possible drawback of the gain scheduling approach is that it requires considerable offline effort to derive a reliable gain schedule for each possible situation that the plant will encounter. The gain scheduling approach can be conveniently viewed as a special case of the adaptive approximation approach developed in this text. A local linear model is an example case of a local approximation function. For example, the linear functions in Figure 5.3 can be replaced by other approximation functions. Typically, the adaptive approximation based techniques developed in this book consist of approximation functions with at least some overlap between, which intuitively can be viewed as a way to obtain a smoother approximation from one operating position (or from one node) to another. One of the key differences between the standard gain scheduling technique and the adaptive approximation based control approach is the ability of the latter to adjust certain parameters (weights) during operation. Unlike gain scheduling, adaptive approximation is designed around the principle of "learning" and thus reduces the amount of modeling effort that needs to be applied offline. Moreover, it allows the control scheme to deal with unexpected changes in plant dynamics due to faults or severe disturbances. |
 . A key element of the gain scheduling approach is the design of a scheduler for switching between the various control laws parameterized by {K1, K2 ... KN}. Typically, transitions between different operating points are handled by interpolation methods. The gain scheduler can be viewed as a look-up table with the appropriate logic for selecting a suitable controller gain Kibased on identifying the corresponding operating point x1.
. A key element of the gain scheduling approach is the design of a scheduler for switching between the various control laws parameterized by {K1, K2 ... KN}. Typically, transitions between different operating points are handled by interpolation methods. The gain scheduler can be viewed as a look-up table with the appropriate logic for selecting a suitable controller gain Kibased on identifying the corresponding operating point x1.