In parallel with developments in adaptive nonlinear control, there has been a tremendous amount of activity in neural control and adaptive fuzzy approaches. In these studies, neural networks or fuzzy approximators are used to approximate unknown nonlinearities. The input/output response of the approximator is modified by adjusting the values of certain parameters, usually referred to as weights. From a mathematical control perspective, neural networks and fuzzy approximators represent just two classes of function approximators. Polynomials, splines, radial basis functions, and wavelets are examples of other function approximators that can be used and have been used in a similar setting. We refer to such approximation models with adaptivity features as adaptive approximators, and control methodologies that are based on them as adaptive approximation based control. Adaptive approximation based control encompasses a variety of methods that appear in the literature: intelligent control, neural control, adaptive fuzzy control, memory-based control, knowledge-based control, adaptive nonlinear control, and adaptive linear control. |
 During the last few years there have been significant developments in the control of highly uncertain, nonlinear dynamical systems. For systems with parametric uncertainty, adaptive nonlinear control has evolved as a powerful methodology leading to global stability and tracking results for a class of nonlinear systems. Advances in geometric nonlinear control theory, in conjunction with the development and refinement of new techniques, such as the backstepping procedure and tuning functions, have brought about the design of control systems with proven stability properties. In addition, there has been a lot of research activity on robust nonlinear control design methods, such as sliding mode control, Lyapunov redesign method, nonlinear damping, and adaptive bounding control. These techniques are based on the assumption that the uncertainty in the nonlinear functions is within some known, or partially known, bounding functions.
During the last few years there have been significant developments in the control of highly uncertain, nonlinear dynamical systems. For systems with parametric uncertainty, adaptive nonlinear control has evolved as a powerful methodology leading to global stability and tracking results for a class of nonlinear systems. Advances in geometric nonlinear control theory, in conjunction with the development and refinement of new techniques, such as the backstepping procedure and tuning functions, have brought about the design of control systems with proven stability properties. In addition, there has been a lot of research activity on robust nonlinear control design methods, such as sliding mode control, Lyapunov redesign method, nonlinear damping, and adaptive bounding control. These techniques are based on the assumption that the uncertainty in the nonlinear functions is within some known, or partially known, bounding functions.Chapter 5.7 - Exercises and Design Problems
Exercise 5.1 Consider the nonlinear system 
Exercise 5.2 Consider the nonlinear system 
Exercise 5.3 Use a simulation study to investigate the performance of the linear feedback control law
developed in Exercise 5.2 when applied to the original nonlinear system. Consider several initial conditions close to the equilibrium point x = x* to get a rough idea of how large is the region of attraction around the equilibrium point. Exercise 5.4 Use a simulation study for the satellite example of Example 5.2. Assume that:
Simulate the differential equation for about 100 s. provide plots of the satellite motion in cartesian coordinates instead of polar coordinates. Interpret your results. Compare the solution of the nonlinear differential equation with that of the linearized model (assume that r0 = 10; θ0 = 0; ω = 0.1). Discuss the accuracy of the linearized model as an approximation of the nonlinear system. Plot the trajectories of the satellite motion of both the linear and nonlinear model on the same diagram for comparison purposes. Exercise 5.5 Consider the nonlinear state equation  with the nominal initial state Exercise 5.6 Consider the following second-order model which represents a field controlled DC motor [248]  where x1 is the armature current, x2 is the speed, and u is the field current. It is required to design a speed control system so that y(t) asymptotically tracks a constant reference speed yd= 100. It is assumed that the domain of operation for the armature current is restricted to x1 > 0.2.
Exercise 5.7 Consider the same field controlled DC motor of Exercise 5.6. Suppose that the speed x2 is measurable but the armature current x1 is not measured for feedback control purposes.
Exercise 5.8 Consider the Example 5.4 on page 195, which describes the model of a single-link manipulator with flexible joints.
Exercise 5.9 Consider the system 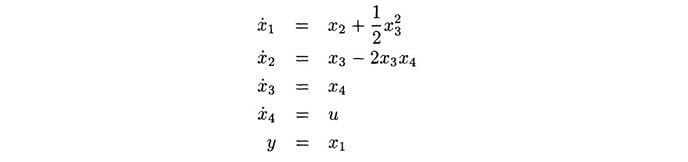 Convert the system to normal form. Design a feedback linearizing tracking controller so that y(t) tracks the target signal yd (t) –sin(t). Exercise 5.10 For the system given in Exercise 5.9, after converting the system to normal form, use standard backstepping to design a tracking controller so that y(t) tracks the target signal yd (t). Exercise 5.11 For the system given in Exercise 5.9, use command filtered backstepping to design a tracking controller so that y(t) tracks the target signal yd (t). Exercise 5.12 Consider the system 
Exercise 5.13 Design a tracking control algorithm for the system  where the desired output signal is yd (t) = sin(3t). Exercise 5.14 Consider Example 5.7 on page 206. Perform a computer simulation study to illustrate the performance of the control system. Similarly, perform a computer simulation for Example 5.8 and compare the differences. Exercise 5.15 Consider Example 5.9 on page 218. Assume that the actual uncertainty term η is given by  while the bound is given by Exercise 5.16 Consider Example 5.10 on page 220. As in Example 5.15, assume that the actual uncertainty term n is given by η(x) = 1.2 cos(x1). Let ø and η0= 1.2 cos(x1). Perform a computer simulation study to illustrate the performance of the control system obtained using the nonlinear damping method. Repeat the simulation for various values of k. Compare the control performance and control effort with the Lyapunov redesign method of Example 5.15. Exercise 5.17 Consider Example 5.12 on page 224. Let Exercise 5.18 For the bounding control of Section 5.4.1 that uses the smoothing approximation, show that e(t) ultimately converges to the set e < δ. Also show that e(t) ≤ δ for |

 . Consider the following cases:
. Consider the following cases:
 , and the nominal input u*(t) = 1. Show that the nominal output is y*(t) = 1. Linearize the state equation about the nominal solution.
, and the nominal input u*(t) = 1. Show that the nominal output is y*(t) = 1. Linearize the state equation about the nominal solution. , where
, where  is known while ε is assumed by the designer to be zero, while in reality it is equal to 0.05. Investigate to what degree this modeling error affects the linearization and the design of the tracking controller.
is known while ε is assumed by the designer to be zero, while in reality it is equal to 0.05. Investigate to what degree this modeling error affects the linearization and the design of the tracking controller. . Perform a computer simulation study to illustrate the performance or the control system using both the discontinuous algorithm and the continuous approximation obtained using the tanh function, with ε = 0.1.
. Perform a computer simulation study to illustrate the performance or the control system using both the discontinuous algorithm and the continuous approximation obtained using the tanh function, with ε = 0.1. and θ = 1. Simulate this example for k1 = k2 = γ = 2. Plot the tracking error, the control effort and the parameter estimation error. Discuss your results.
and θ = 1. Simulate this example for k1 = k2 = γ = 2. Plot the tracking error, the control effort and the parameter estimation error. Discuss your results. .
. 






