Laplace transforms make it easy to represent difficult dynamic systems. A mathematical expression F( s) in the frequency domain represents a function in the time domain, a transfer function F( t) or a time function f( t). A transfer function represents the properties (or the behavior) of a mathematical block (or calculation). A time function represents a value (or signal) over time.
Table A.1: Some Laplace transform pairs useful for transfer function analysis | F( s) | Block type |
| 1 | Gain block (gain = 1) |
|  | Integral block |
|  |  First order lag First order lag |
|  |  Second order lag Second order lag |
| |  |
|  | Sine wave (2 integrators) |
|  | Second order system |
| ST | Derivative block |
| T is the time constant in formulas F(s) | |
Tables A.1 and A.2 shows some laplace transform pairs useful for control system analysis. The output signal f(s) output of a block is calculated as follows:
An explanation of laplace transform theorems is beyond the scope of this publication and not intended. [1] Two examples will be given in Figures A.1 and A.2.
Table A.2: Some Laplace transform pairs useful for transfer function analysis | F( s) | f( t) |
| 1 | Unit impulse |
|  | Unit step |
|  | Unit ramp |
|  | e ?at |
|  |  |
|  |  |
|  | sin Wt |
|  |  |
| |  |
|  |  |
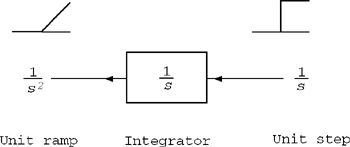 Figure A.1: Integral block with step input
Figure A.1: Integral block with step input 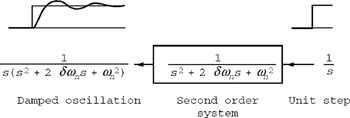 Figure A.2: Second order system with step input
Figure A.2: Second order system with step input The integral block and its input, a step function, is a good example to show that the same function 1/ s in the frequency domain...
Copyright IDC Technologies 2005 under license agreement with Books24x7