DC Motors Information
 DC motors are electric motors that are powered by direct current (DC), such as from a battery or DC power supply. Their commutation can be brushed or brushless. The speed of a brushed DC motor can be controlled by changing the voltage alone. By contrast, an AC motor is powered by alternating current (AC) which is defined by both a voltage and a frequency. Consequently, motors that are powered by AC require a change in frequency to change speed, involving more complex and costly speed control. This makes DC motors better suited for equipment ranging from 12VDC systems in automobiles to conveyor motors, both which require fine speed control for a range of speeds above and below the rated speeds.
DC motors are electric motors that are powered by direct current (DC), such as from a battery or DC power supply. Their commutation can be brushed or brushless. The speed of a brushed DC motor can be controlled by changing the voltage alone. By contrast, an AC motor is powered by alternating current (AC) which is defined by both a voltage and a frequency. Consequently, motors that are powered by AC require a change in frequency to change speed, involving more complex and costly speed control. This makes DC motors better suited for equipment ranging from 12VDC systems in automobiles to conveyor motors, both which require fine speed control for a range of speeds above and below the rated speeds.
When selecting DC motors, industrial buyers need to identify the key performance specifications, determine design and size requirements, and consider the environmental requirements of their application. This selection guide is designed to help with this process.
Performance Specifications
Speed, torque, and operating voltage are the most important performance parameters for DC motors. Supplier datasheets list these specifications as numerical values.
Application Requirements
Buyers should compare what's listed on a DC motor's datasheet to their own application requirements. Because the motor's output parameters are interdependent, a GlobalSpec user may define one or two specifications. The other specifications depend upon these selections.
-
Shaft speed: A DC motor applies a voltage (V) to rotate a shaft at a proportional rotational speed (ω). Shaft speed specs generally refer to the no-load speed, which is the maximum speed the motor can reach when no torque is applied. Typically, shaft speed is given in rotations or revolutions per minute (rpm). These rotations or revolutions can be related to the number of radians to express the motor speed in radians per second (rad/s). For numerical calculations, this unit of rotational speed is more convenient. The following formula describes the relationship between radians per second and rotations or revolutions per minute.
ωrad/s = ωrpm · (2π/60)
For an ideal DC motor, the rotational speed is proportional to the supplied voltage, or
ω = j · V
where j is the constant of proportionality, with units rad/(s-V).
Design Tip: For optimal continuous performance, DC motors typically operate at 70-90% of its no-load speed.
-
Output torque: Shaft rotation generates a rotational force called torque (τ) in the motor. This is the load the motor can generate or handle. Torque is given in force-distance units (lb-ft, oz-in, N-m, etc.). Torque specs generally refer to the stall torque and the continuous torque. Stall torque is the τ at which the shaft speed is zero, or the motor stalls. Continuous torque is the maximum τ at normal running conditions. Note that the torque (τ) of a DC motor is proportional to the armature current (I), and the constant of proportionality is the torque constant (k). The following equation describes the relationships between torque and current.
τ = k · I
or
I = τ/k
The importance of the torque constant is evident from the above equation. For a given torque, a high value of k limits the current to a low value. This is a measure of efficiency, since lower current consumption means lower power (heat) dissipation. The torque constant and the torque produced by the rotor allow us to calculate the current through the armature, which is used to calculate temperature ratings (as shown later).
Design Tip: DC micromotors generally operate at 10-30% of their stall torque (the torque at which the shaft speed is zero or the motor stalls). Motors that are subjected continuously to higher loads are more prone to mechanical failure or heat-related degradation.

Figure 1 - This graph illustrates the relationship between torque and speed, indicating highest (stall) torque at 0 speed and highest (no-load) speed at 0 torque.
-
Available voltage: DC motors may be designed to operate at a specified voltage if only a small or specific range of power supplies is available. The specified voltage determines the motor's rated speed. Generally, voltage is given in volts (V).
Derived Specifications
DC motor datasheets also contain parameters that are derived from or related to the essential requirements.
-
Output power: A regular and important specification, the rated output power (PO) is the product of the motor's rated torque and speed. In equation form, the output power is given by
PO = τ · ω
Maximum output power occurs at 50% of the no-load speed and 50% of the stall torqueMany suppliers specify the output power in terms of horsepower (hp). To convert a calculated value of power from units of watts (W) to units of hp, divide the power in watts by 746.
Design Tip: The motor's rated power should be at least twice the required (calculated) power. This ensures sufficient power for the operation so that the motor is not overworked.
-
Power dissipation: The current produced in a DC motor dissipates power (Pdis) and heats the motor. Total power dissipation is related to total system resistance (RT), which is the resistance of the entire motor system including friction losses in the stator (Rstator) and rotor (Rrotor). The motor's current allows us to calculate the power dissipation and, in turn, the increase in rotor temperature (ΔT) due to the rotation. From ΔT, the total motor temperature (TM) is calculated by adding the environmental temperature (Tenv). The following equations illustrate the steps used to calculate the final motor temperature
Pdis = I2RT
RT = Rrotor + Rstator (except for permanent magnet motors)
ΔT = Pdis(Rtot)
TM = Tenv + ΔT
Design Tip: To extend product life and performance, select a motor with a larger difference between maximum operating temperature and total motor temperature. A rule of thumb is that for every 10°C that the motor temperature exceeds its rated temperature, insulation life is reduced by half. For every 10°C cooler, insulation life is doubled.
Motor Construction
The suitability of a DC motor for an application also depends on its construction, another aspect of the selection process.
Types of DC Motors
There are several different types of DC motors, each of which offers advantages based upon the motor construction.
- Shunt wound motors exhibit minimum speed variation through load range and can be configured for constant horsepower over an adjustable speed range. They are used for applications where precise control of speed and torque are required.
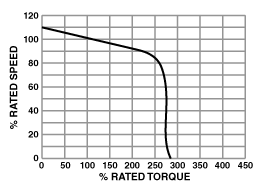
Figure 2 - Typical torque speed curve for a shunt wound motor, with relatively constant torque over a large speed range. Graph Credit: Baldor Electric Company
- Series wound motors exhibit high starting torques for permanently attached loads which are required to prevent damage from high speed conditions. These motors develop a large torque and can be operated at low speeds. They are best suited for heavy industrial applications that require heavy loads to move slowly and lighter loads to move quickly.
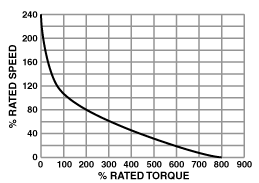
Figure 3 - Typical torque speed curve for series wound motors, with high torque at low speed.
Graph Credit: Baldor Electric Company
- Compound wound motors are designed with both series and shunt winding for constant-speed applications requiring higher torque. They are often used where the primary load requirement is a heavy starting torque, and adjustable speed is not required. Applications include elevators, hoists, and industrial shop equipment.
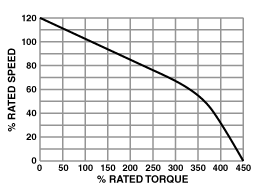
Figure 4 - Typical torque speed for compound wound motors, combining characteristics of shunt wound and series wound. Graph Credit: Baldor Electric Company
- Permanent magnet motors have a magnet permanently embedded into the assembly and no wound field. They offer constant speed with varying load (zero slip) and excellent starting torque. Compared to wound types, permanent magnet construction provides higher efficiency but less speed regulation.
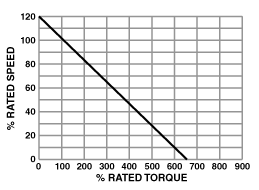
Figure 5 - Typical speed curve for permanent magnet motors, with linear torque-speed proportionality.
Graph Credit: Baldor Electric Company
- Disc armature motors, also called "pancake" or "printed armature" motors, use flat rotors driven by an axially-aligned magnetic field. Their thin construction allows for low inertia, resulting in high acceleration. These motors are good for applications requiring a quick startup and shutdown while bearing a constant load, such as in an electric vehicle.
- Coreless and slotless motors incorporate cylindrical winding that is physically outside of a set of permanent magnets. Because the winding is laminated and excludes an iron cage, these designs have much lower inertia. They boast high acceleration, high efficiency, excellent speed control, and little to no vibration. They are commonly used as servomotors for process control applications.
Commutation
DC motor commutation can be either brushed or brushless, both of which offer specific advantages.
- Brushed motors use contact brushes that connect with the commutator to alter current direction. Brushed construction is less costly than brushless, and control of brushed motors is simple and inexpensive. Brushed motors require periodic maintenance to replace worn out brushes, but can operate in extreme environments due to their lack of electronics.
- Brushless motors use a permanent magnet embedded in the rotor assembly. They may use one or more Hall Effect devices to sense rotor position, and the associated drive electronics control the shaft rotation (speed). Brushless motors are similar to AC motors, but are electronically commutated (ESM) so that they can be powered by DC. Brushless commutation is more efficient, requires less maintenance, generates less noise, and has a higher power density and speed range than brushed commutation. However, the electronics of brushless motors generally contribute to their higher capital cost, complexity, and environmental limitations.
Sizing and Environmental Considerations
When selecting DC motors, buyers should also consider the design area and environmental factors.
Sizing Considerations
If a DC motor must fit a space or meet a weight requirement, then physical characteristics may be important selection factors. Shaft configuration and incorporated gearing are also important considerations.
- Shaft configuration determines how the motor is mounted and connected to the system it powers. Shaft selection is essential for system compatibility. Optimum selection boosts effectiveness and can save time and cost during assembly. Configurations may include concave, round, square, hexagonal, splined, grooved, stepped, and screw types.
- Gearing is used in motors to increase or reduce shaft speed. It tends to decrease motor volume or weight. The types of gears that are used in DC motors may include spur, planetary, harmonic, worm, or bevel gears.
Environmental Considerations
Finally, buyers of DC motors may need to consider environmental conditions or application requirements when sourcing products.
- Operating temperature should be considered when using sensitive electronic equipment, when the environment is not at the standard 40°C, or when the environment may be sensitive to a motor's heat dissipation. Additive cooling mechanisms can be installed to counteract excessive heating of the motor or the surrounding environment.
- Corrosion protection should be considered in environments where the motor is exposed to radiation, dust, or hazardous substances that could degrade the motor. Proper motor enclosure and materials can be selected to ensure protection against contamination.
- Water protection should be considered when a motor must operate while exposed to water. Protection levels range from protection against minimal vertical dripping to full submersion under pressure.
Related Articles and Threads
Asynchronous Motors or DC Motors?
What’s The Difference Between Brush DC And Brushless DC Motors?
References
Integrated Publishing - Types of DC Motors
EC&M Magazine - Motor Temperature Ratings
Plant Engineering - How To Select A DC Electric Motor
MicroMo - How To Select A DC Motor
Dynetic Systems - Brushless vs. Brushed
Baldor - Basic Motor Theory, Figures 2-5
Image Credit: Dart Controls, Inc.; Galil Motion Control; Stock Drive Products/Sterling Instrument
- Alabama
- Arkansas
- Arizona
- California
- Colorado
- Connecticut
- Florida
- Georgia
- Iowa
- Idaho
- Illinois
- Indiana
- Kansas
- Kentucky
- Louisiana
- Massachusetts
- Maryland
- Maine
- Michigan
- Minnesota
- Missouri
- Mississippi
- Montana
- North Carolina
- Nebraska
- New Hampshire
- New Jersey
- New Mexico
- Nevada
- New York
- Ohio
- Oklahoma
- Oregon
- Pennsylvania
- Rhode Island
- South Carolina
- Tennessee
- Texas
- Virginia
- Washington
- Wisconsin
- West Virginia
- 1 HP
- 1/2 HP
- 1/4 HP
- 12 Volt
- 160 Volt
- 2 HP
- 24 Volt
- 300 W
- 48 Volt
- 5 HP / 3.6 KW
- 6 Volt
- 72 Volt
- 9 Volt
- 90 Volt
- Brush
- Brushless
- Coreless / Slotless
- Cylindrical Body
- Disc Armature
- Double-ended
- Drip-proof
- Dust-proof
- English
- Explosion-proof
- Geared
- Hollow
- In-line
- Integral Brake
- Integral Clutch
- Integral Encoder
- Integral Resolver
- Integral Tachometer
- Metric
- Offset / Parallel
- Open Frame / Frameless
- Permanent Magnet
- Planetary
- Right Angle
- Series Wound
- Shunt Wound
- Single-ended
- Spur
- Square Body
- Torque Motor
- Totally Enclosed
- Vacuum Use
- Waterproof
- Worm
- 12 volt electric motor
- air compressor motor
- 12v DC motor
- universal electric motor
- 24V DC motor
- PMDC motor
- DC shunt motor
- 12v DC permanent magnet motor
- 24 volt DC motor
- overhead crane motor
- 12 volt screw jack motor
- low RPM DC motor
- compressor torque specs
- DC motor 1 RPM
- DC motor price list
- permanent magnet DC motor co
- 4 HP 36 volt DC motor
- data sheet of DC motor 12v
- motor 12v 1HP
- right angle DC motor
- 12 volt DC motor specification
- 12v 1 HP DC motor
- 36 volt DC motor
- DC submersible motor
- 18 volt DC power supply
- 48 volt DC motor
- 50 HP electric motor
- 5hp DC motor
- 6 volt DC motor
- electric motor rewind